Concept & Goals
Inspiration: Give a plant a “voice” through digital animation and sound, fostering empathy and care.
The idea was to monitor ambient light and human touch on the plant, translate those signals into a friendly digital avatar’s mood, color-changing lamp, moving leaf, and background music.
-
-
Goals:
-
Awareness of plant wellbeing via playful tech.
-
Interaction through capacitive touch (DIY sensor) and light sensing.
-
Empathy by giving the plant a way to “talk back.”
-
-
Video
Avatar
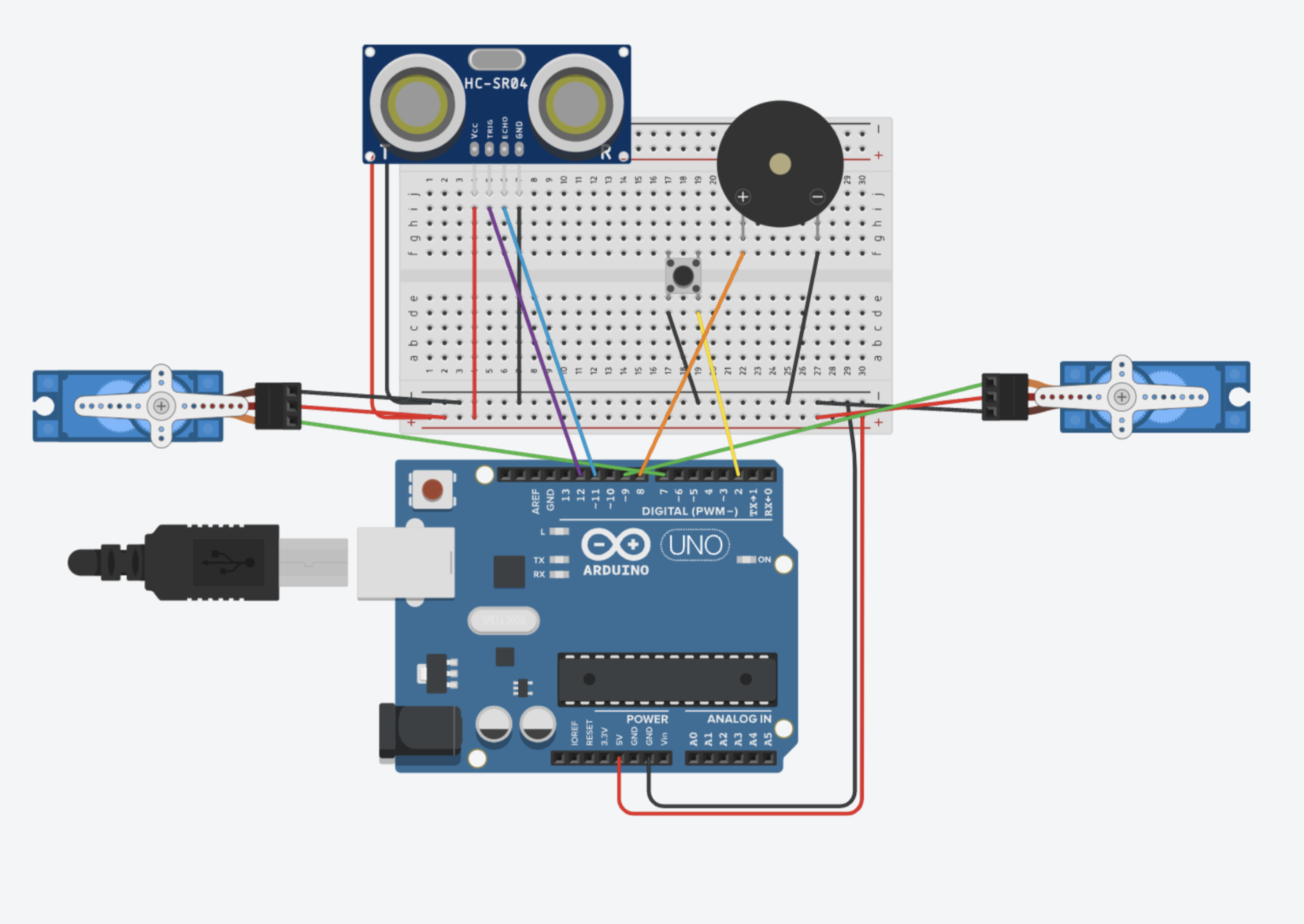
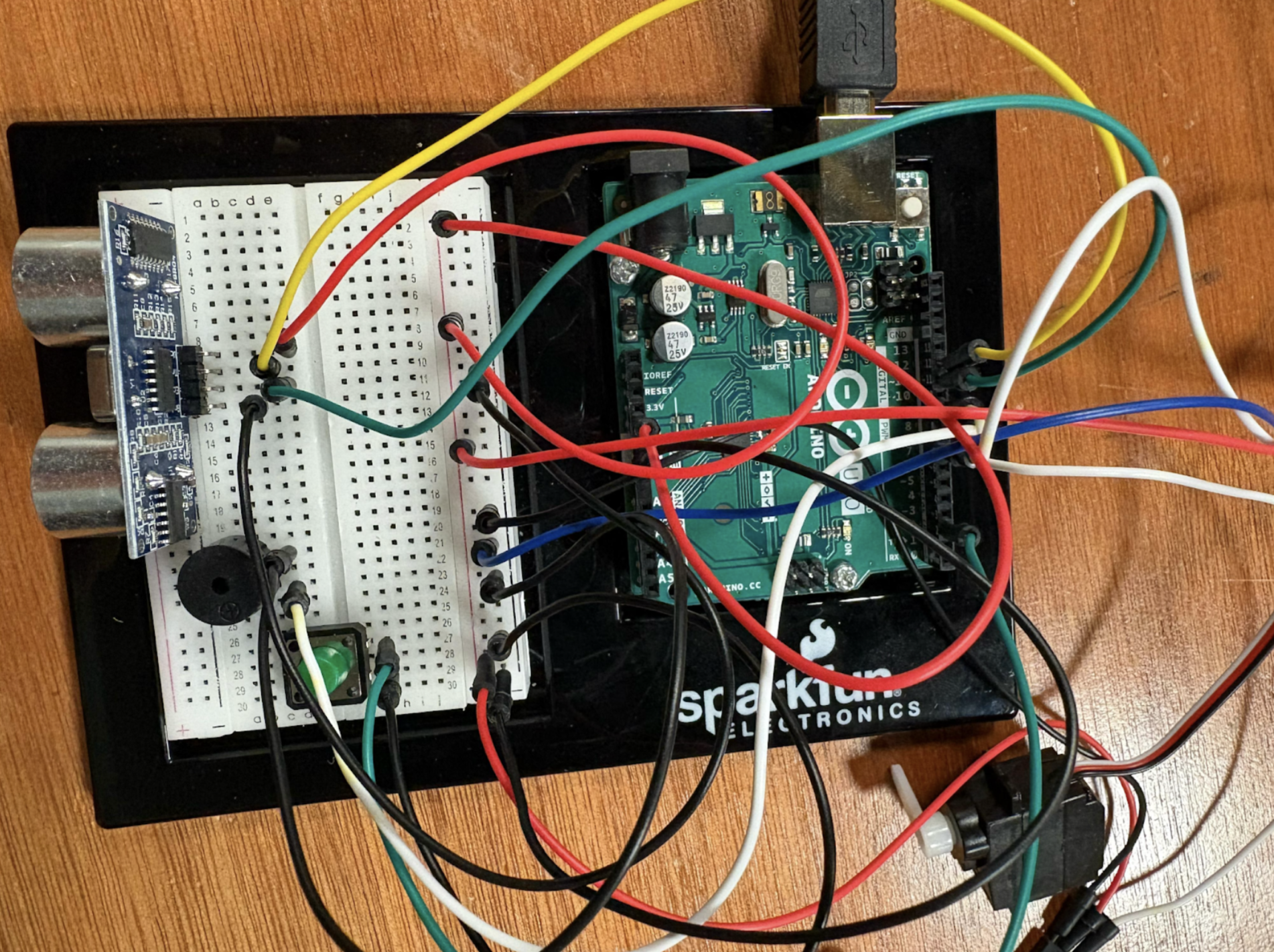
Setup



Hardware Overview

1. Capacitive Touch Sensor (DIY)
-
-
Pins: D4 (send) → 1 MΩ resistor → D2 (receive + foil/copper tape).
-
Library: Paul Badger’s CapacitiveSensor. Downloaded for the Arduino code.
-
Assembly:
-
Connect a 1 MΩ resistor between pin 4 and pin 2.
-
Attach copper tape to the receiving leg (pin 2) and wrap gently around the plant’s leaves.
-
In code:
CapacitiveSensor capSensor(4, 2);
-
-
2. Photoresistor (Ambient Light)
-
-
Pins: LDR → +5 V; 10 kΩ → GND; junction → A0.
-
Function: Reads 0–1023, mapped to 0–255 to control lamp intensity.
-
3. Push-Button (Music Control)
-
-
Pins: Button COM → D7, NO → GND (using
INPUT_PULLUP).
-
4. Mood LEDs
-
-
Pins:
-
Green LED1: D12 → 330 Ω → LED → GND
-
Red LED2: D13 → 330 Ω → LED → GND
-
-
Behavior:
-
Red LED on when touch > high threshold (indicates that the plant does not like the touch).
-
Green LED on when touch < low threshold (the plant is calm and likes the touch).
-
-
Arduino Code
#include <CapacitiveSensor.h>
// Capacitive sensor: send→ 4, receive→ 2
CapacitiveSensor capSensor(4, 2);
// Mood LEDs
const int ledPin = 12;
const int ledPin2 = 13;
// Photoresistor
const int photoPin = A0;
// Push-button + button LED
const int buttonPin = 7; // COM→7, NO→GND
// Hysteresis thresholds
const long thresholdHigh = 40;
const long thresholdLow = 20;
// Debounce
const unsigned long debounceDelay = 50;
unsigned long lastDebounceTime = 0;
int lastButtonReading = HIGH;
// State trackers
bool musicOn = false;
bool led1On = false;
void setup() {
Serial.begin(9600);
delay(100);
// Let p5.js know we start OFF
Serial.println("MUSIC_OFF");
// Mood LEDs
pinMode(ledPin, OUTPUT);
pinMode(ledPin2, OUTPUT);
// Capacitive sensor raw
capSensor.set_CS_AutocaL_Millis(0);
// Button LED off
pinMode(buttonLedPin, OUTPUT);
digitalWrite(buttonLedPin, LOW);
// Push-button with pull-up
pinMode(buttonPin, INPUT_PULLUP);
}
void loop() {
// Button toggle (only prints MUSIC_ON / MUSIC_OFF)
int reading = digitalRead(buttonPin);
if (reading != lastButtonReading) {
lastDebounceTime = millis();
}
if (millis() - lastDebounceTime > debounceDelay) {
static int buttonState = HIGH;
if (reading != buttonState) {
buttonState = reading;
if (buttonState == LOW) { // you pressed
musicOn = !musicOn;
Serial.println(musicOn ? "MUSIC_ON" : "MUSIC_OFF");
digitalWrite(buttonLedPin, musicOn ? HIGH : LOW);
}
}
}
lastButtonReading = reading;
// Capacitive
long sensorValue = capSensor.capacitiveSensor(30);
Serial.println(String("TOUCH:") + sensorValue);
// Mood LED hysteresis
if (!led1On && sensorValue > thresholdHigh) {
led1On = true;
} else if (led1On && sensorValue < thresholdLow) {
led1On = false;
}
digitalWrite(ledPin, led1On ? HIGH : LOW);
digitalWrite(ledPin2, led1On ? LOW : HIGH);
// Photoresistor
int raw = analogRead(photoPin);
int mappedVal = map(raw, 0, 1023, 0, 255);
Serial.println(String("LAMP:") + mappedVal);
delay(50);
}
Serial messages:
-
-
MUSIC_ON/MUSIC_OFF(button) -
TOUCH:<value>(capacitive) -
LAMP:<0–255>(light)
-
P5js Code
let port;
const baudrate = 9600;
let connectButton;
let bgMusic;
let interactionStarted = false;
let isTouched = false;
let lampBrightness = 0;
let plankCount = 6;
let cam;
let myFont;
let waveAngle = 0;
let isWaving = false;
let waveStartTime = 0;
function preload() {
myFont = loadFont('CalligraphyFLF.ttf');
bgMusic = loadSound('musica.mp3'); // load MP3
}
// Works for clicks, touches, and fullscreen events
const unlockAudio = () => {
if (!audioUnlocked) {
getAudioContext().resume().then(() => {
console.log('AudioContext unlocked');
audioUnlocked = true;
if (musicOn && bgMusic.isLoaded()) bgMusic.loop();
});
}
};
// Mouse/touch unlock
window.addEventListener('mousedown', unlockAudio);
window.addEventListener('touchstart', unlockAudio);
// Also unlock on fullscreen change
document.addEventListener('fullscreenchange', unlockAudio);
function setup() {
createCanvas(windowWidth, windowHeight, WEBGL);
connectButton = createButton("Connect to Arduino");
connectButton.position(20, 20);
connectButton.mousePressed(() => {
port.open(baudrate);
});
port = createSerial();
const used = usedSerialPorts();
if (used.length > 0) {
port.open(used[0], baudrate);
} else {
console.warn("No previously used serial ports found.");
}
setInterval(onSerialData, 50);
textFont(myFont);
textSize(36);
textAlign(CENTER, CENTER);
cam = createCamera();
const fov = PI / 3;
const cameraZ = (height / 2.0) / tan(fov / 2.0);
cam.setPosition(0, 0, cameraZ);
cam.lookAt(0, 0, 0);
frameRate(60);
}
function onSerialData() { //serial data
if (!port || !port.opened()) return;
while (port.available() > 0) {
const raw = port.readUntil('\n');
if (!raw) break;
const line = raw.trim();
console.log('Received:', line);
if (line.startsWith('LAMP:')) {
lampBrightness = int(line.split(':')[1]);
} else if (line.startsWith('TOUCH:')) {
const t = int(line.split(':')[1]);
// ignore baseline zero readings
if (t > 0) {
isTouched = true;
isWaving = true;
waveStartTime = millis();
}
} else if (line === 'START') {
interactionStarted = true;
} else if (line === 'MUSIC_ON') {
musicOn = true;
if (bgMusic.isLoaded()) {
console.log('MUSIC_ON → play');
bgMusic.play();
}
} else if (line === 'MUSIC_OFF') {
musicOn = false;
if (bgMusic.isPlaying()) {
console.log('MUSIC_OFF → stop');
bgMusic.stop();
}
}
}
}
//Draw
function draw() {
background(210, 180, 140);
ambientLight(10);
pointLight(255, 200, 150, 200, -300, 300);
pointLight(255, 150, 100, 400, -300, 300);
drawWarmGradientBackground();
drawWarmLamp();
drawWoodDeck();
drawWoodenBase();
drawShadow();
drawPot();
drawBody();
drawFace();
drawPetiole();
drawInstructionFrame();
if (!interactionStarted) {
drawInstructionFrame();
} else {
drawScene();
pointLight(lampBrightness, lampBrightness * 0.8, 100, 200, -300, 300);
}
if (isWaving) {
waveAngle = sin((millis() - waveStartTime) / 2000) * 0.5;
if (millis() - waveStartTime > 400) {
isWaving = false;
waveAngle = 0;
}
}
push();
rotateZ(waveAngle);
drawLeaf(0, -140, 0, 1, 4);
pop();
push();
rotateZ(-waveAngle);
drawLeaf(0, -140, 0, -1, 4);
pop();
}
function windowResized() {
resizeCanvas(windowWidth, windowHeight);
const fov = PI / 3;
const cameraZ = (height / 2.0) / tan(fov / 2.0);
cam.setPosition(0, 0, cameraZ);
}
function drawWarmLamp() {
push();
translate(250, -250, 0);
// glow — modulate alpha by lampBrightness
for (let r = 300; r > 50; r -= 20) {
push();
noStroke();
// fade alpha between 0 and 150
let a = map(lampBrightness, 0, 255, 20, 150);
fill(255, 180, 90, a);
ellipse(0, 10, r, r * 1.2);
pop();
}
// stand
fill(100, 70, 50);
translate(0, 200, 0);
cylinder(5, 400);
// base
translate(0, 200, 0);
fill(80, 60, 40);
ellipse(0, 0, 80, 16);
// lampshade (inverted cone)
push();
translate(0, -400, 0);
fill(225, 190, 150);
cone(50, -100, 24);
pop();
pop();
}
function drawWoodDeck() {
push();
rotateX(HALF_PI);
translate(0, -2, -170);
// static plank color
fill(160, 100, 60);
stroke(100, 60, 40);
const plankHeight = -50;
for (let i = 0; i < plankCount; i++) {
box(width, plankHeight, 10);
translate(0, plankHeight, 0);
}
pop();
}
function drawWoodenBase() {
push();
rotateX(HALF_PI);
translate(0, 150, -200);
// static plank color
fill(160, 100, 60);
stroke(100, 60, 40);
const baseCount = 8;
const plankWidth = (width * 1.2) / baseCount;
for (let i = 0; i < baseCount; i++) {
push();
translate(-width * 0.6 + i * plankWidth + plankWidth / 2, 24, 0);
box(plankWidth, 400, 20);
pop();
}
pop();
}
function drawShadow() {
push();
translate(0, 150, -10);
rotateX(HALF_PI);
noStroke();
fill(80, 70, 60, 30);
ellipse(0, 0, 190, 30);
pop();
}
function drawPot() {
push();
translate(0, 100, 0);
fill(170, 108, 57);
stroke(120, 70, 40);
strokeWeight(1);
cylinder(60, 80);
translate(0, -50, 0);
fill(190, 120, 70);
cylinder(80, 20);
pop();
}
function drawBody() {
push();
translate(0, 20, 0);
noStroke();
fill(150, 255, 150);
sphere(75);
translate(0, -90, 0);
sphere(70);
// highlights
fill(255, 255, 255, 90);
translate(-30, -10, 50);
sphere(10);
pop();
}
function drawPetiole() {
push();
translate(0, -110, 20); // start from top of head
rotateX(radians(200)); // slight backward tilt
fill(100, 200, 100);
noStroke();
cylinder(8, 100);
pop();
}
function drawLeaf(x, y, z, flip = 1, scaleFactor = 1) {
push();
translate(x, y, z);
rotateZ(flip * QUARTER_PI); // tilt outwards
rotateX(HALF_PI - QUARTER_PI * 0.5); // add a slight backward curve
scale(flip * scaleFactor, scaleFactor); // flip + scale
fill(100, 200, 100);
stroke(60, 160, 80);
strokeWeight(1);
beginShape();
vertex(0, 0);
bezierVertex(-35, -90, -70, -10, 0, 0); // left curve
endShape(CLOSE);
// Center vein
stroke(90, 150, 80);
strokeWeight(2);
line(0, 0, -40, -29);
pop();
}
function drawFace() {
push();
translate(0, -100, 70);
stroke(10);
strokeWeight(2);
noFill();
arc(-20, 0, 20, 10, 0, PI);
arc(20, 0, 20, 10, 0, PI);
// blush
noStroke();
fill(255, 200, 200, 100);
ellipse(-35, 10, 15, 8);
ellipse(35, 10, 15, 8);
// smile
stroke(30);
noFill();
arc(0, 15, 30, 10, 0, PI);
pop();
}
function drawWarmGradientBackground() {
push();
translate(0, 0, -500); // move far behind the scene
noStroke();
beginShape();
fill(250, 230, 200); // top (warm cream)
vertex(-width, -height);
vertex(width, -height);
fill(210, 170, 130); // bottom (warm brownish-orange)
vertex(width, height);
vertex(-width, height);
endShape(CLOSE);
pop();
}
function drawInstructionFrame() {
push();
// move to a spot on the back wall
translate(-width * 0.25, -height * 0.25, -490);
// outer frame (landscape)
fill(120, 80, 40);
box(430, 300, 10);
// inner “paper” canvas inset
push();
translate(0, 0, 7);
fill(255, 245, 220);
box(390, 260, 2);
pop();
// text
push();
translate(0, 0, 12);
fill(60, 40, 30);
textSize(40);
textAlign(CENTER, CENTER);
text("Make the Plant Happy\n- Press to play Music\n- Control the Lighting\n- Pet the plant", 0, 0);
pop();
pop();
}
Functionality Flow
-
-
Startup
-
Arduino sends
MUSIC_OFF. p5.js opens port, waits forSTART(button press on avatar).
-
-
Interaction
-
Touch: Plant touch →
TOUCH:<value>→ leaf animation. -
Light: Ambient changes →
LAMP:<0–255>→ lamp glow intensity. -
Music: Physical push-button →
MUSIC_ON/MUSIC_OFF→ background music.
-
-
Challenges & Solutions
-
-
Serial Fragmentation: Split messages were mis-parsed → switched to single
println("TOUCH:"+value)calls. -
Sensor Hysteresis: Capacitive values vary → implemented high/low thresholds to avoid flicker.
-
Full-Screen Behavior: Music wouldn’t play in full screen → tied audio unlock to
fullscreenchangeevent.
-