
Concept
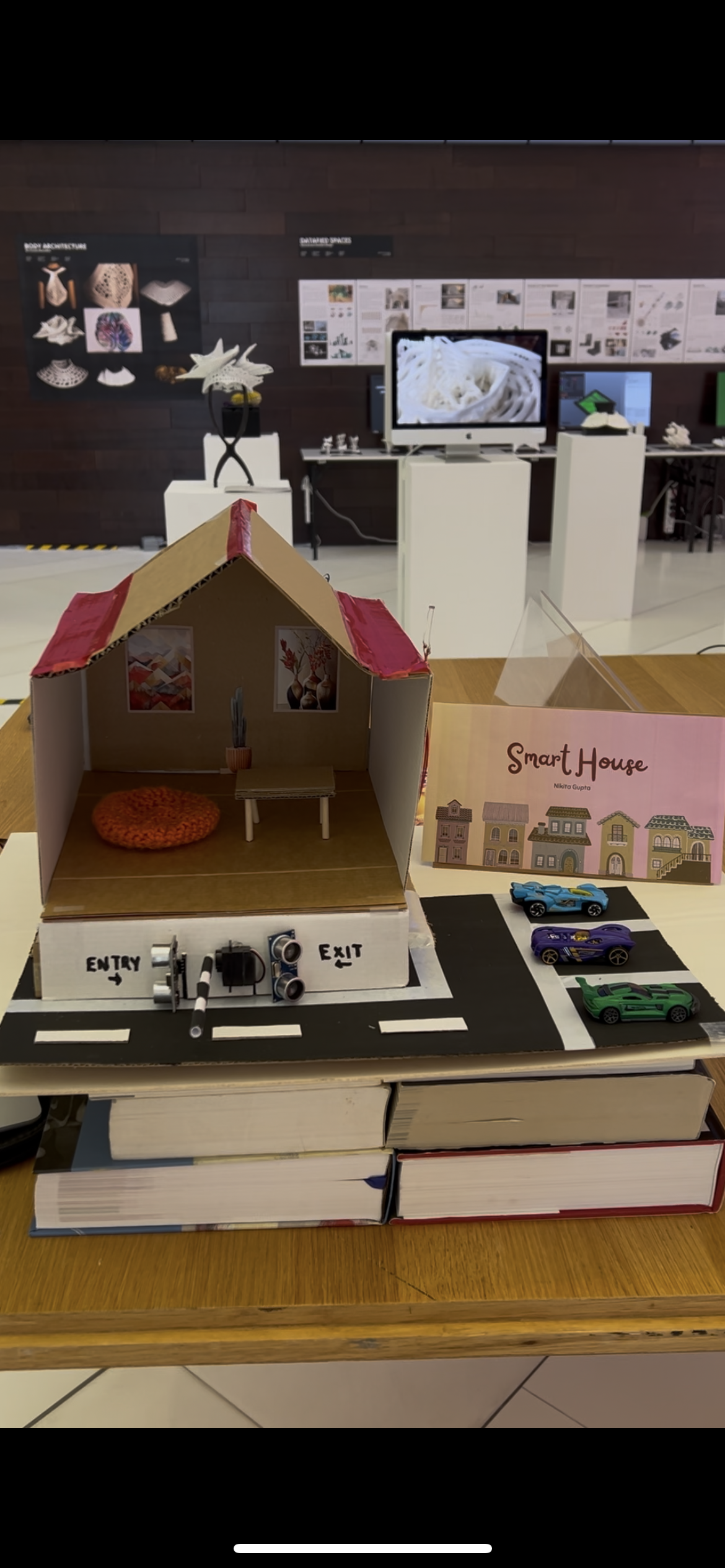
The Smart House System is an interactive physical computing project that simulates features of an intelligent home using Arduino UNO and p5.js. The system includes:
-
A smart parking assistant that detects cars entering and exiting, and updates available parking slots automatically.
-
A light automation system that turns on indoor lights when it gets dark, based on ambient light readings.
-
A real-time dashboard and voice announcer, implemented in p5.js, that visualizes the system state and speaks updates aloud using
p5.speech.
This system provides a fun and engaging way to demonstrate real-world home automation, combining sensors, outputs, and visual/voice feedback for user interaction.
Interaction Demo

How the Implementation Works
The system uses ultrasonic distance sensors to detect when a vehicle is near the entry or exit of the parking area. A servo motor simulates the gate that opens when a car arrives and parking is available.
A photoresistor (LDR) detects light levels to automatically turn on five LEDs that simulate indoor lighting when it gets dark.
All event messages from Arduino are sent to a p5.js sketch over web serial. The browser-based sketch then:
-
Displays the parking status
-
Shows light status
-
Uses p5.speech to speak real-time messages like “Parking is full!” or “Lights are now on!”
Interaction Design
The project is designed for simple, touchless interaction using real-world analog sensors:
-
Bringing your hand or an object close to the entry sensor simulates a car arriving. If space is available, the gate opens, the slot count is reduced, and a voice announces the update.
-
Moving your hand in front of the exit sensor simulates a car leaving, increasing the parking availability.
-
Covering the LDR sensor simulates nighttime — lights automatically turn on, and the system announces it.
-
The p5.js dashboard shows real-time status and acts as an interactive voice feedback system.
Arduino Code
The Arduino UNO is responsible for:
-
Reading two ultrasonic sensors for car entry/exit
-
Reading the photoresistor (LDR) for light level
-
Controlling a servo motor for the gate
-
Controlling 5 indoor LEDs
-
Sending status messages to the p5.js sketch over serial
Code Overview:
-
Starts with 3 available parking slots
-
Gate opens and slot count decreases when a car is detected at entry
-
Slot count increases when a car exits
-
Indoor lights turn on when light level drops below a threshold
-
Sends messages like
car_entry,car_exit,parking_full,lights_on,lights_off, andparking_spots:X
#include <Servo.h>
// Ultrasonic sensor pins
#define trigEntry 2
#define echoEntry 3
#define trigExit 4
#define echoExit 5
// Servo motor pin
#define servoPin 6
// LED pins
int ledPins[] = {7, 8, 9, 10, 11};
// Light sensor pin
#define lightSensor A0
Servo gateServo;
int Slot = 3; // Initial parking spots
void setup() {
Serial.begin(9600);
// Ultrasonic sensors
pinMode(trigEntry, OUTPUT);
pinMode(echoEntry, INPUT);
pinMode(trigExit, OUTPUT);
pinMode(echoExit, INPUT);
// LED pins
for (int i = 0; i < 5; i++) {
pinMode(ledPins[i], OUTPUT);
}
// LDR analog input
pinMode(lightSensor, INPUT);
// Servo
gateServo.attach(servoPin);
gateServo.write(100); // Gate closed
}
void loop() {
int entryDistance = getDistance(trigEntry, echoEntry);
int exitDistance = getDistance(trigExit, echoExit);
int lightValue = analogRead(lightSensor); // 0 (dark) to 1023 (bright)
Serial.print("Entry: "); Serial.print(entryDistance);
Serial.print(" | Exit: "); Serial.print(exitDistance);
Serial.print(" | Light: "); Serial.print(lightValue);
Serial.print(" | Slots: "); Serial.println(Slot);
// ===== Car Entry Logic =====
if (entryDistance < 10 && Slot > 0) {
openGate();
Slot--;
Serial.println("car_entry");
Serial.print("parking_spots:");
Serial.println(Slot);
delay(2000);
closeGate();
}
// ===== Parking Full Logic =====
else if (entryDistance < 10 && Slot == 0) {
Serial.println("parking_full");
delay(1000); // Prevent spamming the message
}
// ===== Car Exit Logic =====
if (exitDistance < 10 && Slot < 3) {
openGate();
Slot++;
Serial.println("car_exit");
Serial.print("parking_spots:");
Serial.println(Slot);
delay(2000);
closeGate();
}
// ===== Light Control (5 LEDs) =====
if (lightValue < 900) { // It's dark
for (int i = 0; i < 5; i++) {
digitalWrite(ledPins[i], HIGH);
}
Serial.println("lights_on");
} else {
for (int i = 0; i < 5; i++) {
digitalWrite(ledPins[i], LOW);
}
Serial.println("lights_off");
}
delay(500);
}
// ===== Gate Functions =====
void openGate() {
gateServo.write(0);
delay(1000);
}
void closeGate() {
gateServo.write(100);
delay(1000);
}
// ===== Distance Sensor Function =====
int getDistance(int trigPin, int echoPin) {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
long duration = pulseIn(echoPin, HIGH);
int distance = duration * 0.034 / 2;
return distance;
}
Circuit Schematic

p5.js Code and Dashboard
The p5.js sketch:
-
Uses the
p5.webseriallibrary to connect to Arduino -
Uses
p5.speechfor voice announcements -
Displays a dashboard showing the number of available parking slots
-
Shows the indoor light status using a colored circle
The voice announcements are fun and slightly humorous, e.g.:
“A wild car appears!”
“Uh-oh! Parking is full.”
“It’s getting spooky in here… turning the lights on!”
The sketch uses a say() wrapper function to safely trigger voice output in Chrome after the user clicks once.
Code Highlights:
-
Automatically resumes Chrome’s audio context
-
Waits for user interaction before enabling speech
-
Processes serial messages one line at a time
-
Provides a Connect/Disconnect button for user control
Arduino and p5.js Communication
The communication uses Web Serial API via p5.webserial:
-
Arduino sends messages like
"car_entry\n","lights_on\n", etc. -
p5.js reads each line, processes it, updates the dashboard, and speaks it out loud
-
A connect button in the sketch allows users to select their Arduino port manually
-
All communication is unidirectional: Arduino → p5.js
What I’m Proud Of
-
Fully working sensor-triggered voice feedback via p5.js — makes the system feel alive
-
Smooth parking logic with entry and exit detection
-
Integration of multiple Arduino components (servo, LDR, LEDs, ultrasonic)
-
An intuitive UI that works both visually and with voice
-
Reliable browser-based connection using modern Web Serial
Areas for Future Improvement
-
Add a screen-based parking spot display (e.g., 7-segment or OLED)
-
Use non-blocking code in Arduino with
millis()instead ofdelay() -
Make a mobile-responsive version of the dashboard UI
-
Add a security camera feed or face detection in p5.js
-
Improve the servo animation to be smoother and time-synced
-
Add a buzzer or alert when parking is full






