
Exercise 1:
Demo:
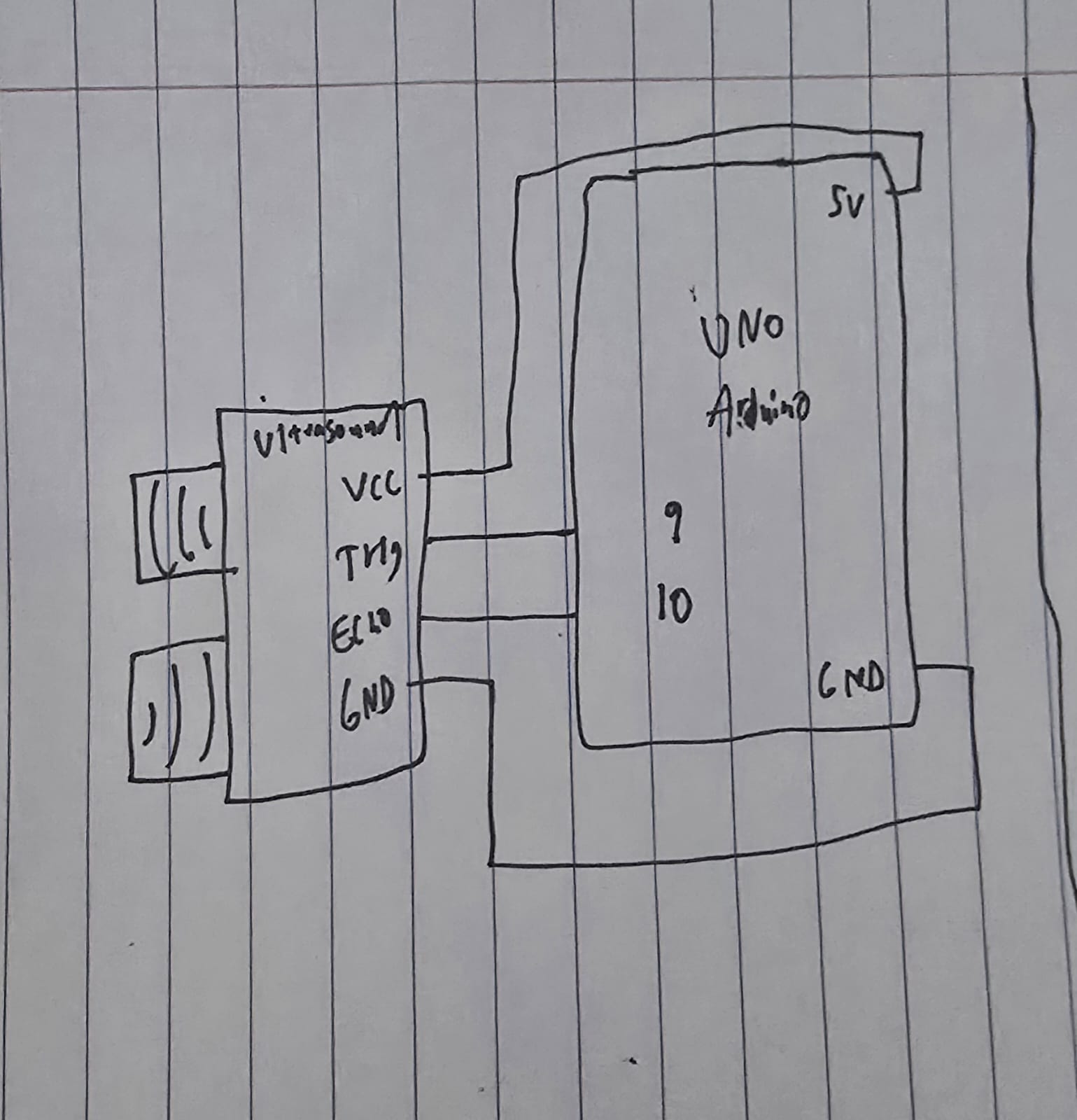
Schematic:
Implementation:
I used an ultrasound sensor for this exercise, so the ellipse moves depending on how close or far my hand is from the sensor.
void loop() {
// Trigger the sensor
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Measure the bounce back time
long duration = pulseIn(echoPin, HIGH);
// Calculate distance
int distance = duration * 0.034 / 2;
// Send just the number to p5.js
Serial.println(distance);
delay(50);
}
The code for using the sensor is pretty standard, trigger it so often, measure the duration using the formula (speed * time), and then send that to p5js.
Speed is the speed of sound (0.034 cm per microsecond) and time is duration / 2 since it is a round trip.
// Read from serial
let str = port.readUntil("\n");
if (str.length > 0) {
let val = int(str);
// Validate value
if (!isNaN(val)) {
sensorValue = val;
}
}
// Map the value
let xPos = map(sensorValue, 5, 50, 0, width);
// Constrain the ellipse to canvas
xPos = constrain(xPos, 0, width);
fill(0, 255, 200);
noStroke();
ellipse(xPos, height / 2, 50, 50);
From p5js side, we take the value, validate it, then create a mapping of the value to x position as well as constraining it, then finally draw the ellipse.
Exercise 2:
Demo:
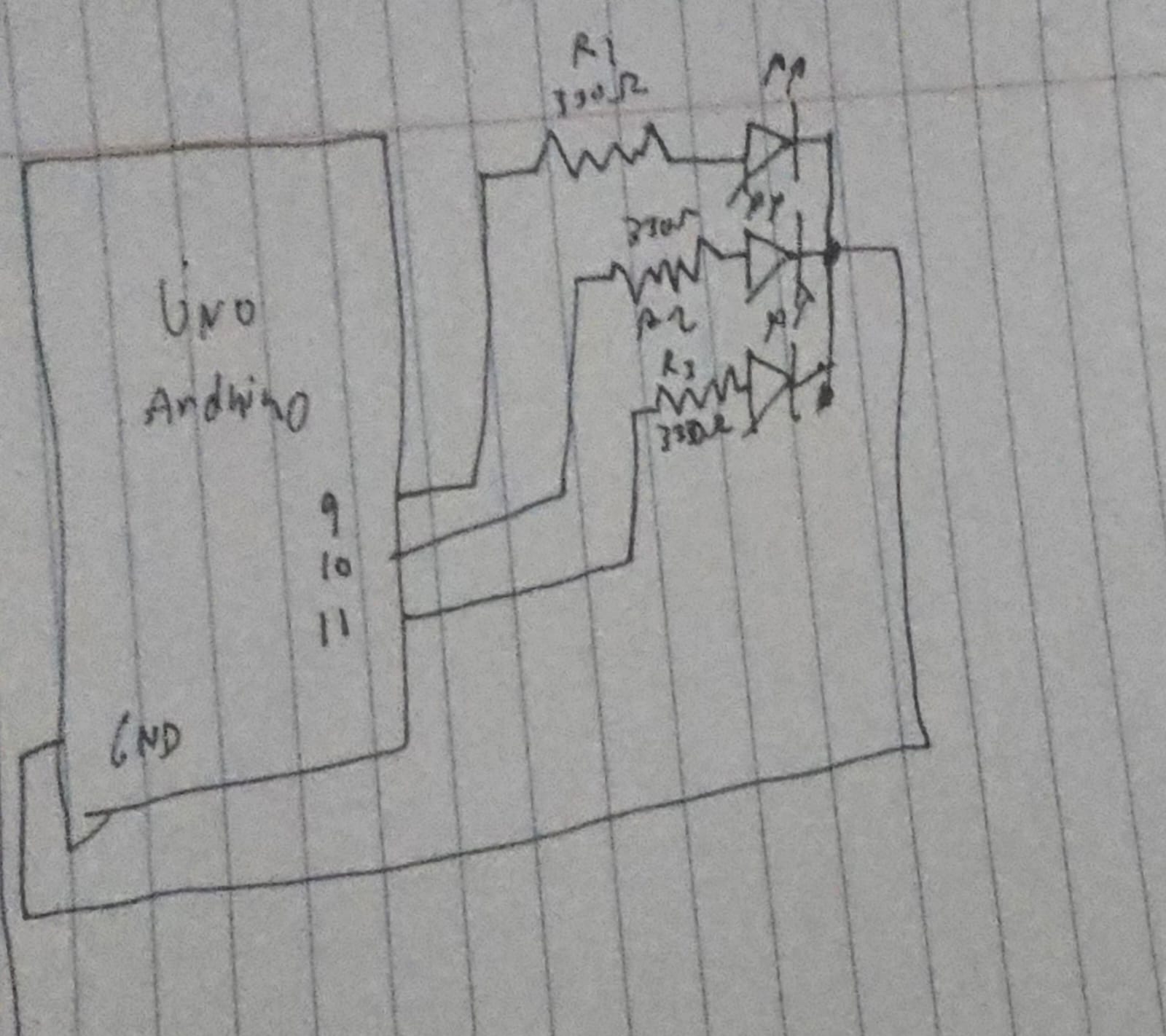
Schematic:
Implementation:
In p5js, I have 3 sliders, 1 for R, 1 for G, and 1 for B, I am using an RGB LED, so we can switch around the sliders to get our custom color from the LED.
// Read the three integers sent from p5.js
// parseInt() looks for digits and skips non-digits
int r = Serial.parseInt();
int g = Serial.parseInt();
int b = Serial.parseInt();
// Look for the newline character to confirm the end of the message
if (Serial.read() == '\n') {
// Apply the brightness to each pin
analogWrite(redPin, r);
analogWrite(greenPin, g);
analogWrite(bluePin, b);
On the Arduino side the code is pretty simple, just read each color and write it to the LED.
// Send to Arduino port.write(r + "," + g + "," + b + "\n");
This is really what’s doing the work, it takes the values from the slider and sends them to the Arduino in such a format that it could read it easily.
Exercise 3:
Demo:
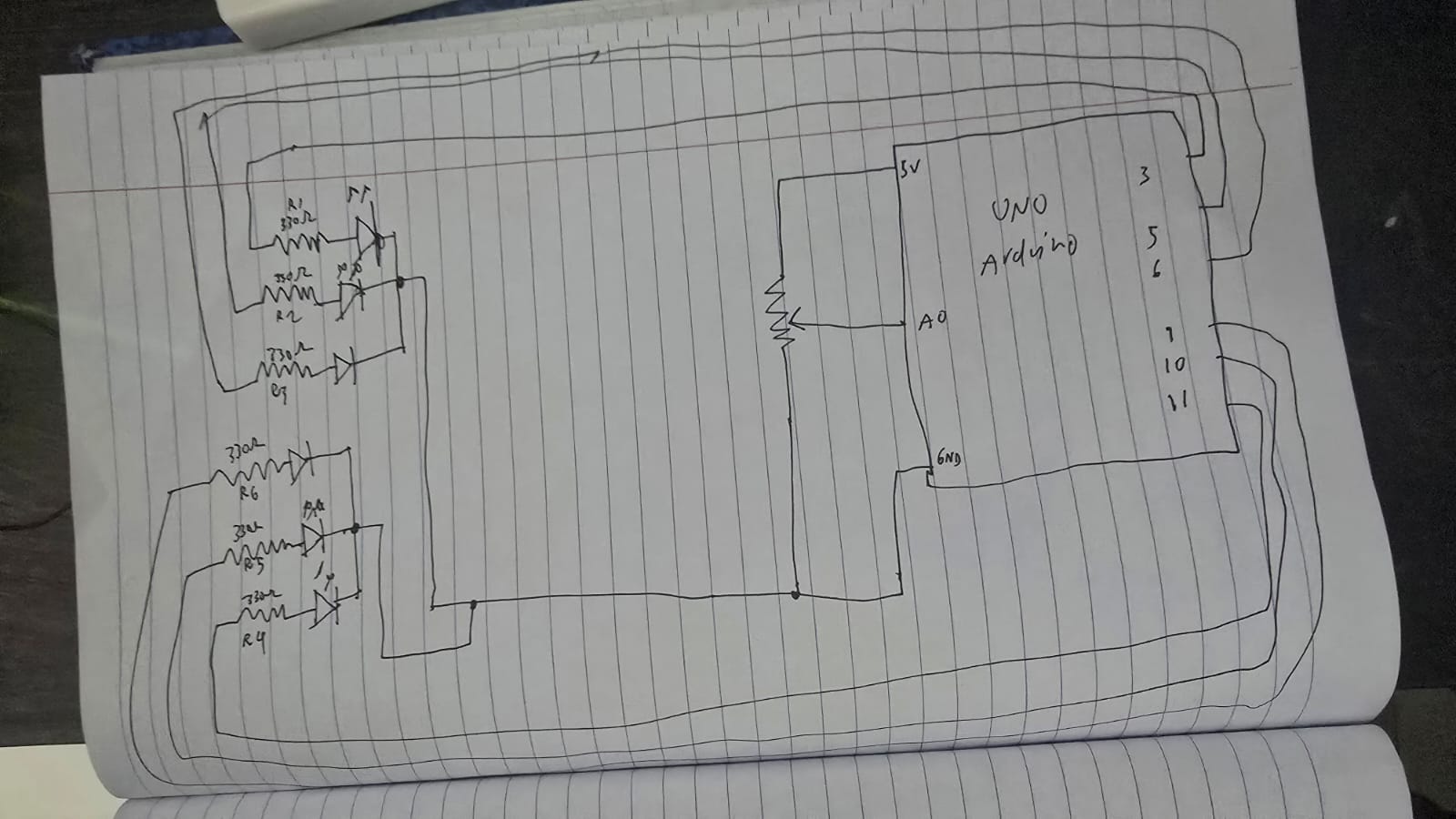
Schematic:
Implementation:
I copied the basic implementation of the wind mechanics from the code, however instead of left and right buttons, I switched out with a potentiometer:
let windForce = map(sensorValue, 0, 1023, -0.5, 0.5);
I have 2 RGB LED’s, and each light up depending on what side of the “wall” the ball hits.
// Left Wall
if (position.x < mass/2) {
velocity.x *= -0.9;
position.x = mass/2;
sendColor("L");
}
// Right Wall
if (position.x > width - mass/2) {
velocity.x *= -0.9;
position.x = width - mass/2;
sendColor("R");
}
The code to send the colors itself to the Arduino is:
// Sending color + direction
function sendColor(side) {
if (port.opened()) {
let r = floor(random(255));
let g = floor(random(255));
let b = floor(random(255));
// Sending: Side,R,G,B (e.g., "L,255,0,0")
port.write(side + "," + r + "," + g + "," + b + "\n");
}
}
We create a random number for each color and then send it to the Arduino along with the direction.
if (side == 'L' || side == 'R') {
Serial.read(); // Skip the comma
int r = Serial.parseInt();
int g = Serial.parseInt();
int b = Serial.parseInt();
if (side == 'L') {
flash(L_red, L_green, L_blue, r, g, b);
} else {
flash(R_red, R_green, R_blue, r, g, b);
}
}
From the Arduino side, we read the colors like how we read it in exercise 2, then depending on the side we light up the left or right side.