
INTRODUCTION:
This assignment had us learn and implement serial communication between Arduino and P5.js. The conversation could be one direction or bi-directional. The script and additional web-based API, provided by NYU’s I.M faculty was used to implement concept, which utilized Arduino and P5.js.

SCHEMATIC AND WIRING:
 The sketch for the wiring and connections.
The sketch for the wiring and connections.
 Schematic for the Arduino connection and port mapping
Schematic for the Arduino connection and port mapping
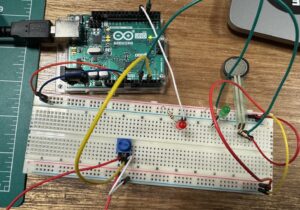
For this assignment, potentiometer was used for adjusting the vertical affects of the wind. The FSR – Force Sensitive Resistor was used to move the ball horizontally. Depending on the pressure, you would have rightward movement. For the LED in the middle, that was used to indicate impact with the surface. Hence would light up whenever the ball would bounce. As for the right most LED, it would light up, when the button on P5.JS was triggered, i.e increase the brightness. The port-mapping and pin assignment are visible on both the sketch, as well as the schematic.
P5 PROJECT AND CODE:
let fsrVal = 0;
let potVal = 0;
let led1Brightness = 0;
let bounceFlag = 0;
let position, velocity, acceleration, gravity, wind;
let drag = 0.99;
let mass = 50;
let prevBounce = false;
let button;
function setup() {
createCanvas(640, 360);
position = createVector(width / 2, 0);
velocity = createVector(0, 0);
acceleration = createVector(0, 0);
gravity = createVector(0, 0.5 * mass);
wind = createVector(0, 0);
button = createButton('Increase Brightness');
button.position(10, height + 10);
button.mousePressed(() => {
led1Brightness = (led1Brightness + 200) % 256;
});
}
function draw() {
background(255);
// ========== Task 1: move ellipse horizontally using FSR only ==========
let xMapped = map(fsrVal, 0, 1023, 50, width - 50);
position.x = xMapped;
// ========== Task 3: adjust gravity based on potentiometer ==========
let gravityScale = map(potVal, 0, 1023, 0.1, 0.5);
gravity.y = gravityScale * mass;
applyForce(wind);
applyForce(gravity);
velocity.add(acceleration);
velocity.mult(drag);
position.add(velocity);
acceleration.mult(0);
ellipse(position.x, position.y, mass, mass);
// ========== Bounce Logic ==========
let isBouncing = false;
if (position.y > height - mass / 2) {
velocity.y *= -0.9;
position.y = height - mass / 2;
isBouncing = true;
}
// Detect rising edge (bounce just occurred)
bounceFlag = isBouncing && !prevBounce ? 1 : 0;
prevBounce = isBouncing;
// ========== Serial send ==========
if (serialActive) {
let sendToArduino = led1Brightness + "," + bounceFlag + "\n";
writeSerial(sendToArduino);
}
// Debugging values
fill(0);
text(`FSR: ${fsrVal}`, 10, 20);
text(`Pot: ${potVal}`, 10, 40);
text(`LED Brightness: ${led1Brightness}`, 10, 60);
}
function applyForce(force) {
let f = p5.Vector.div(force, mass);
acceleration.add(f);
}
function keyPressed() {
if (key == " ") {
setUpSerial();
}
if (key === 'l' || key === 'L') {
velocity.y = -10; // Negative Y velocity = upward bounce
}
}
// Serial reading
function readSerial(data) {
if (data != null) {
let fromArduino = split(trim(data), ",");
if (fromArduino.length === 2) {
fsrVal = int(fromArduino[0]);
potVal = int(fromArduino[1]);
}
}
}
/*
int fsrPin = A0; // Task 1 - Move ellipse
int led1Pin = 3; // Task 2 - LED controlled by p5.js button (PWM)
int potPin = A2; // Task 3 - Gravity control
int led2Pin = 5; // Task 3 - Blink on bounce (PWM)
int led1Brightness = 0;
bool bounceFlag = false;
void setup() {
Serial.begin(9600);
pinMode(LED_BUILTIN, OUTPUT);
pinMode(led1Pin, OUTPUT);
pinMode(led2Pin, OUTPUT);
// Initial blink
digitalWrite(led1Pin, HIGH);
digitalWrite(led2Pin, HIGH);
delay(200);
digitalWrite(led1Pin, LOW);
digitalWrite(led2Pin, LOW);
while (Serial.available() <= 0) {
digitalWrite(LED_BUILTIN, HIGH);
Serial.println("0,0");
delay(300);
digitalWrite(LED_BUILTIN, LOW);
delay(50);
}
}
void loop() {
while (Serial.available()) {
digitalWrite(LED_BUILTIN, HIGH);
int led1Val = Serial.parseInt(); // brightness from p5.js (0–255)
int bounce = Serial.parseInt(); // whether ball bounced (1 or 0)
if (Serial.read() == '\n') {
analogWrite(led1Pin, led1Val);
if (bounce == 1) {
digitalWrite(led2Pin, HIGH);
delay(50);
digitalWrite(led2Pin, LOW);
}
int fsrVal = analogRead(fsrPin);
int potVal = analogRead(potPin);
Serial.print(fsrVal);
Serial.print(",");
Serial.println(potVal);
}
}
digitalWrite(LED_BUILTIN, LOW);
}
*/
ARDUINO CODE:
int fsrPin = A0; // Task 1 - Move ellipse
int led1Pin = 3; // Task 2 - LED controlled by p5.js button (PWM)
int potPin = A2; // Task 3 - Gravity control
int led2Pin = 5; // Task 3 - Blink on bounce (PWM)
int led1Brightness = 0;
bool bounceFlag = false;
void setup() {
Serial.begin(9600);
pinMode(LED_BUILTIN, OUTPUT);
pinMode(led1Pin, OUTPUT);
pinMode(led2Pin, OUTPUT);
// Initial blink
digitalWrite(led1Pin, HIGH);
digitalWrite(led2Pin, HIGH);
delay(200);
digitalWrite(led1Pin, LOW);
digitalWrite(led2Pin, LOW);
while (Serial.available() <= 0) {
digitalWrite(LED_BUILTIN, HIGH);
Serial.println("0,0");
delay(300);
digitalWrite(LED_BUILTIN, LOW);
delay(50);
}
}
void loop() {
while (Serial.available()) {
digitalWrite(LED_BUILTIN, HIGH);
int led1Val = Serial.parseInt(); // brightness from p5.js (0–255)
int bounce = Serial.parseInt(); // whether ball bounced (1 or 0)
if (Serial.read() == '\n') {
analogWrite(led1Pin, led1Val);
if (bounce == 1) {
digitalWrite(led2Pin, HIGH);
delay(50);
digitalWrite(led2Pin, LOW);
}
int fsrVal = analogRead(fsrPin);
int potVal = analogRead(potPin);
Serial.print(fsrVal);
Serial.print(",");
Serial.println(potVal);
}
}
digitalWrite(LED_BUILTIN, LOW);
}
DEMO VIDEO:
In the video, the FSR is used to move the ball on the X-axis i.e task 1. The potentiometer value, which is set to zero, is tuned up. When it increases, the vertical wind pressure makes the bounce and rebound lower. Nonetheless, whenever it bounces, the red LED in the middle lights up i.e task 3. Using P5.js, the brightness can be adjusted, which is demonstrated and visualized through the LED on the right-most side.
CHALLENGES:
Since I was in the hospital, couldn’t get to team up with anyone, missed out on the lecture, it was extremely hard to configure and understand the serial communication between P5.js and Arduino. Nonetheless, after going on and on, again and again over Professor Shiloh’s notes, I finally got it to work.
The tutorials online had a software that used node.js for the communication. A misdirection which costed me my time and energy. Took forever to debug. Since my classmates were busy and I had everything piled up, getting it done on time was hard. Nonetheless, managed to do so. As for the other challenges, the LED light for increase in Brightness was initially green. It wouldn’t increase in brightness significantly, which led me to suspect issue with the code. After much time spent, it was realized that that LED despite working, for some-reason didn’t respond to the PWM signals as accurately as the RED one. So, it was swapped with the RED LED.
Preliminary Concept for the final Project
The concept for the final project kept on varying from a robotic soccer leg ( discussed with Professor Aya) to a prosthetic hand, which was discussed in detail with Professor Shiloh. The final project as of now remains unclear. I do want to make something crazy and go all out. Currently I think of something that involves me reusing and crafting from scratch by reusing already available materials (hacking). Hence, something which fits a perfect balance between hardware, and soft-logic. Something that makes use of all of the concepts (or most of them), which were learnt inside the class.