
I have been looking into the machine learning library, and so far, I have achieved the poseNet creation for the palms but I am now looking into how this can be used to control my steering wheel. What steering wheel you might be wondering. So I have created a steering wheel that I plan to use to control the wheels of the car I would create. That is if I should choose to create a car. The p5 sketch for the steering wheel so far is below
So I continue to look into how to do the integration but for the ML so far this is what I have below:
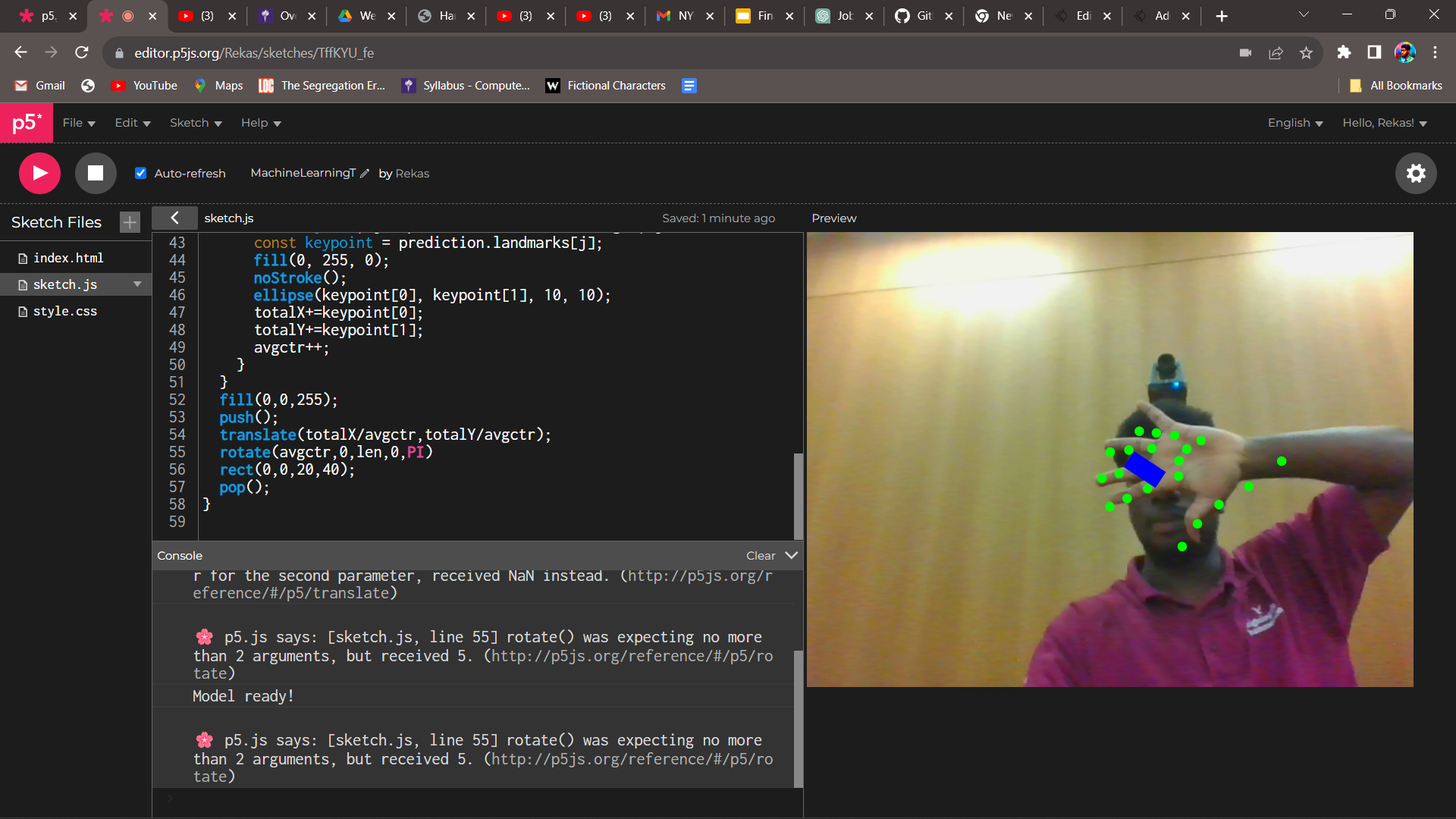
Its not much but its cooking. Inshallah!