int left = 0;
int right = 0;
void setup() {
Serial.begin(9600);
Serial.println("0,0");
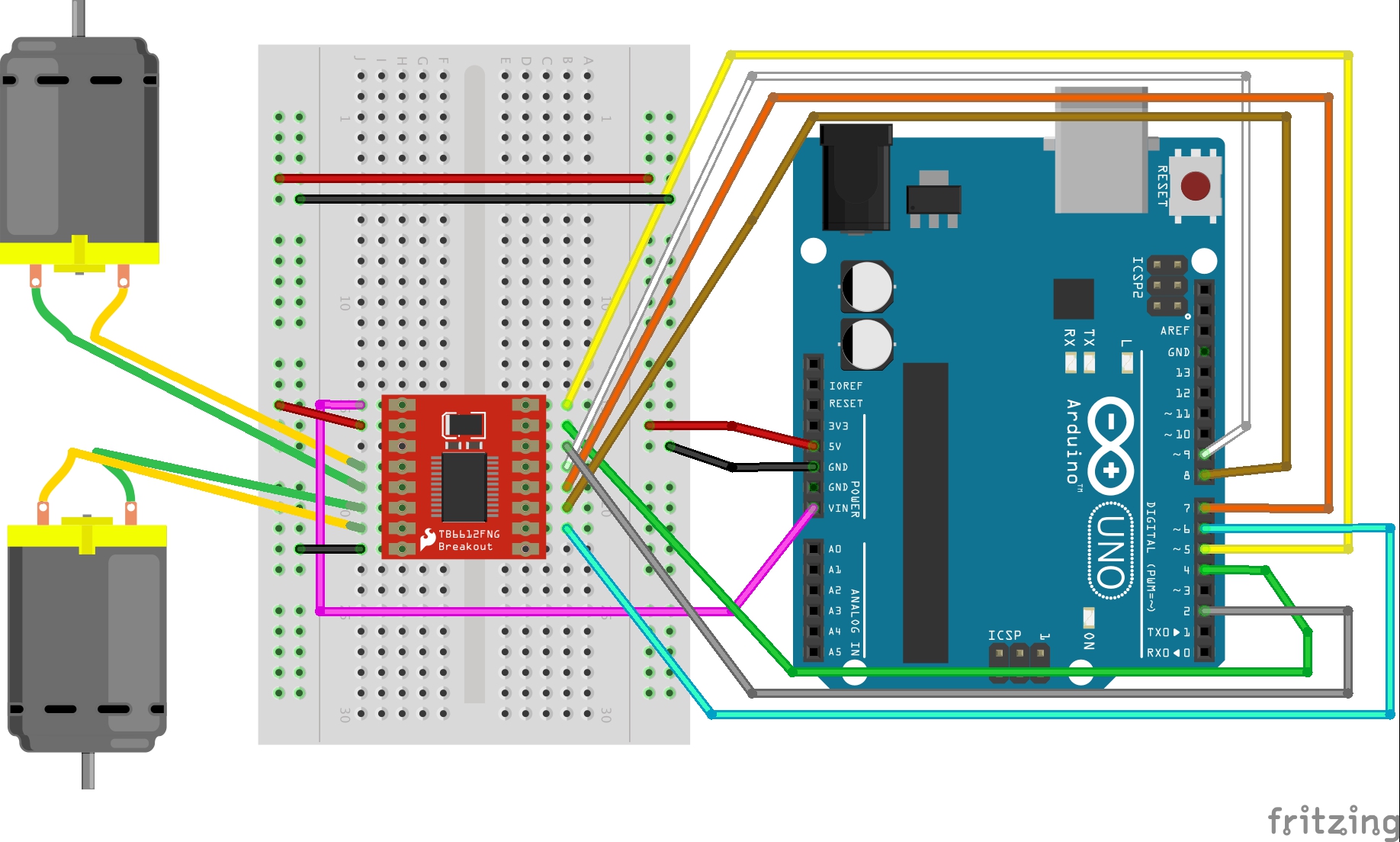
pinMode(2, OUTPUT);
pinMode(5, OUTPUT);
}
void loop() {
while (Serial.available()) {
right = Serial.parseInt();
left = Serial.parseInt();
if (Serial.read() == '\n') {
digitalWrite(2, right);
digitalWrite(5, left);
int sensor = analogRead(A0);
delay(1);
int sensor2 = analogRead(A1);
delay(1);
Serial.print(sensor);
Serial.print(',');
Serial.println(sensor2);
}
}
}
/*
import processing.serial.*;
Serial myPort;
int xPos=0;
int yPos=0;
boolean onOff=false;
boolean onOff2=false;
void setup(){
size(960,720);
printArray(Serial.list());
String portname=Serial.list()[1];
println(portname);
myPort = new Serial(this,portname,9600);
myPort.clear();
myPort.bufferUntil('\n');
}
void draw(){
background(255);
ellipse(xPos,yPos,30,30);
if (mousePressed){
if(mouseX<=width/2)
onOff2=true;
else
onOff=true;
}else{
onOff=onOff2=false;
}
}
void serialEvent(Serial myPort){
String s=myPort.readStringUntil('\n');
s=trim(s);
if (s!=null){
println(s);
int values[]=int(split(s,','));
if (values.length==2){
xPos=(int)map(values[0],0,1023,0, width);
yPos=(int)map(values[1],0,1023,0, height);
}
}
myPort.write(int(onOff)+","+int(onOff2)+"\n");
}
*/
All serial examples: https://github.com/aaronsherwood/introduction_interactive_media/tree/master/arduinoExamples/serialExamples
-
make something that uses only one sensor on arduino and makes the ellipse in processing move on the horizontal axis, in the middle of the screen, and nothing on arduino is controlled by processing
-
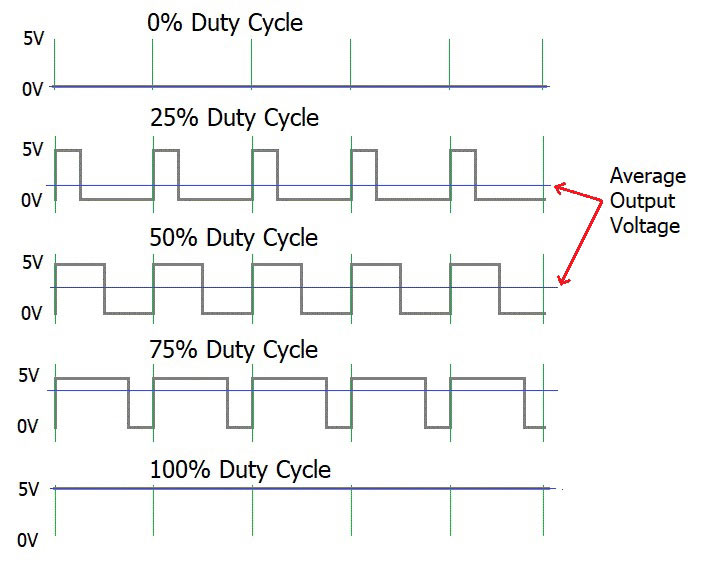
make something that controls the LED brightness from processing
-
take the gravity wind example below and make it so every time the ball bounces one led lights up and then turns off, and you can control the wind from one analog sensor
PVector velocity;
PVector gravity;
PVector position;
PVector acceleration;
PVector wind;
float drag = 0.99;
float mass = 50;
float hDampening;
void setup() {
size(640,360);
noFill();
position = new PVector(width/2, 0);
velocity = new PVector(0,0);
acceleration = new PVector(0,0);
gravity = new PVector(0, 0.5*mass);
wind = new PVector(0,0);
hDampening=map(mass,15,80,.98,.96);
}
void draw() {
background(255);
if (!keyPressed){
wind.x=0;
velocity.x*=hDampening;
}
applyForce(wind);
applyForce(gravity);
velocity.add(acceleration);
velocity.mult(drag);
position.add(velocity);
acceleration.mult(0);
ellipse(position.x,position.y,mass,mass);
if (position.y > height-mass/2) {
velocity.y *= -0.9; // A little dampening when hitting the bottom
position.y = height-mass/2;
}
}
void applyForce(PVector force){
// Newton's 2nd law: F = M * A
// or A = F / M
PVector f = PVector.div(force, mass);
acceleration.add(f);
}
void keyPressed(){
if (keyCode==LEFT){
wind.x=-1;
}
if (keyCode==RIGHT){
wind.x=1;
}
if (key==' '){
mass=random(15,80);
position.y=-mass;
velocity.mult(0);
}
}