
Task 1:
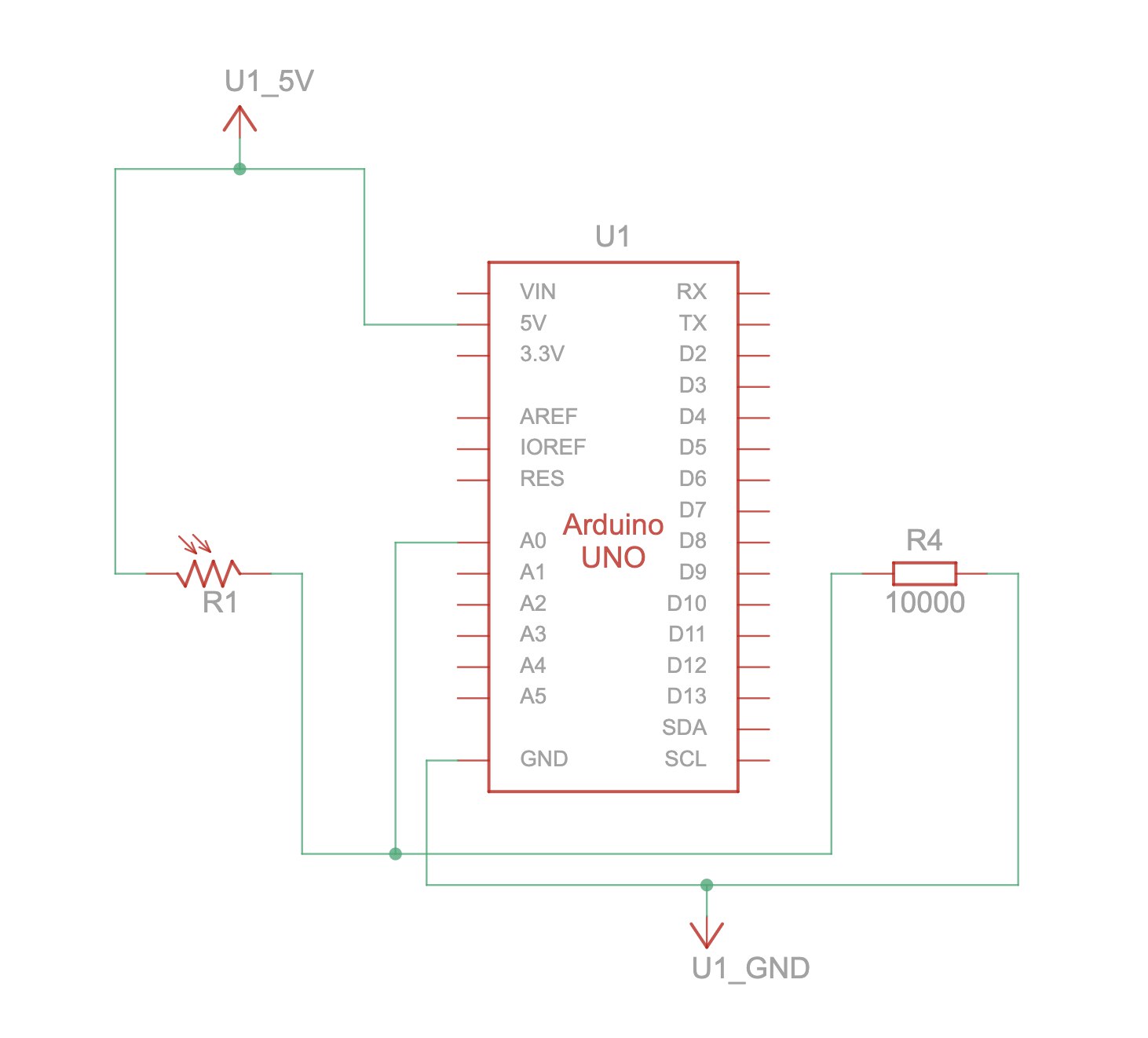
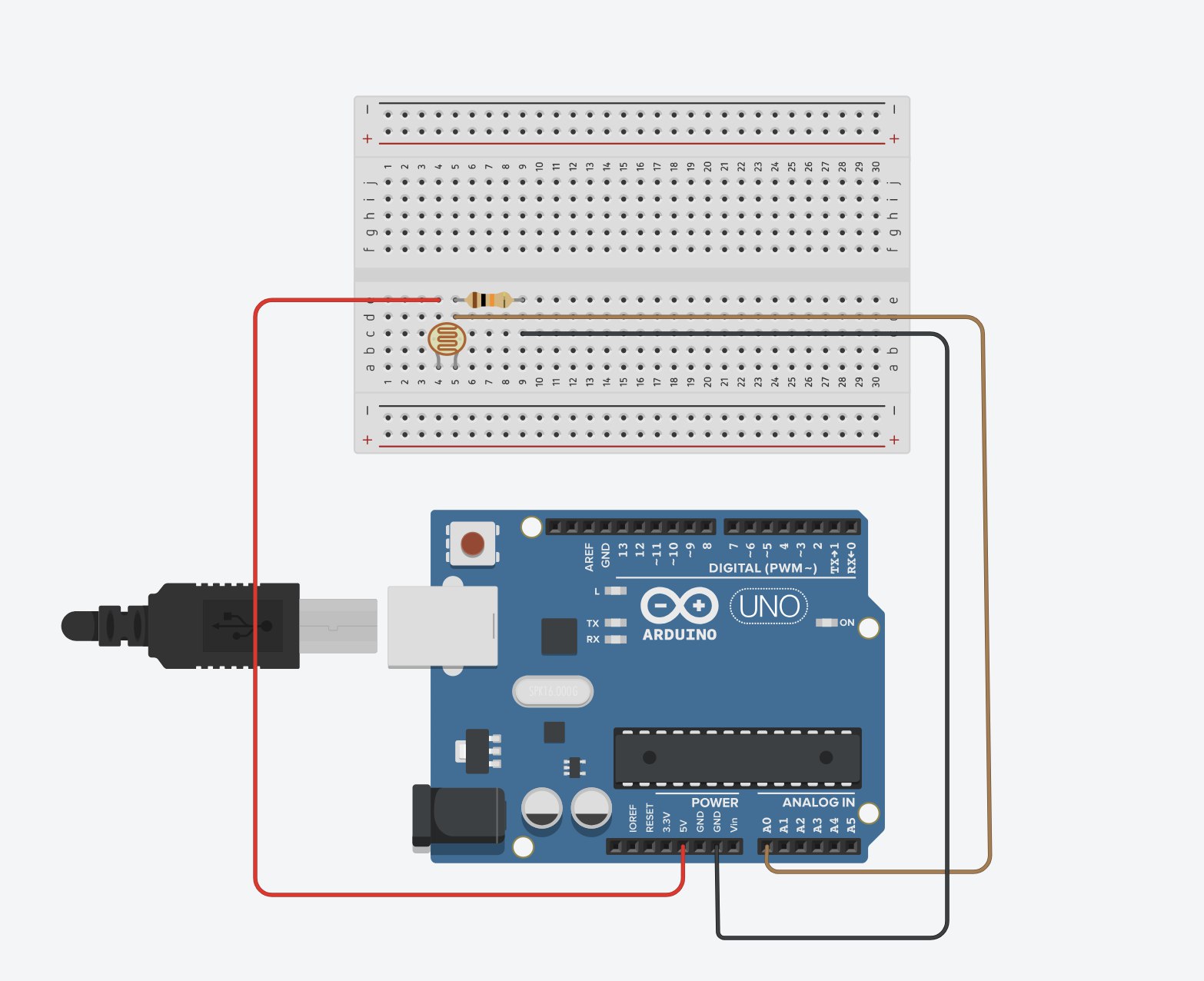
Light sensor controls ellipse on p5.js
https://drive.google.com/file/d/1LG16uZcffBsWkmddW0rGVTF8lVujMUjo/view?usp=sharing
int lightPin = A0;
void setup() {
Serial.begin(9600);
pinMode(lightPin, INPUT);
}
void loop() {
int sensorValue = analogRead(A0);
Serial.println(sensorValue);
delay(5);
}
let address = 0;
function setup() {
createCanvas(600, 600);
noFill();
}
function draw() {
background("purple");
stroke("white");
// Convert the incoming sensor reading (0–1023) into a horizontal screen position
ellipse(map(address, 0, 1023, 0, width), height / 2, 100, 100);
if (!serialActive) {
// Show a connection screen while serial communication hasn’t started yet
background("rgb(70,9,70)");
stroke("white");
textSize(50);
text("Press Space Bar to select Serial Port", 20, 30, width - 30, 200);
}
}
function keyPressed() {
// When the space bar is pressed, begin the setup process for the serial port
if (key == " ") setUpSerial();
}
function readSerial(data) {
// If valid data arrives from the Arduino, save it for use in draw()
if (data != null) {
address = int(data);
}
}
 Task 2:
Task 2:
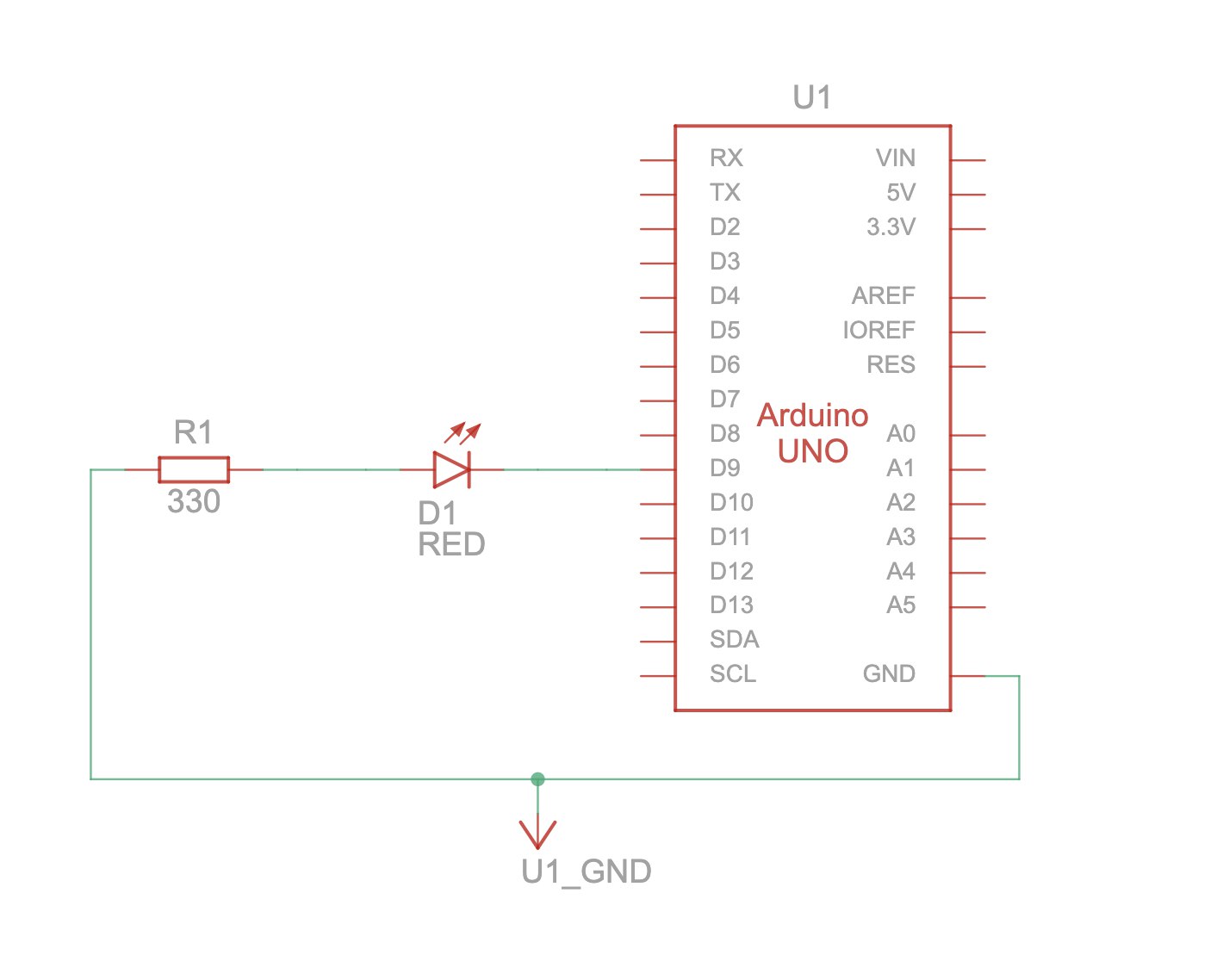
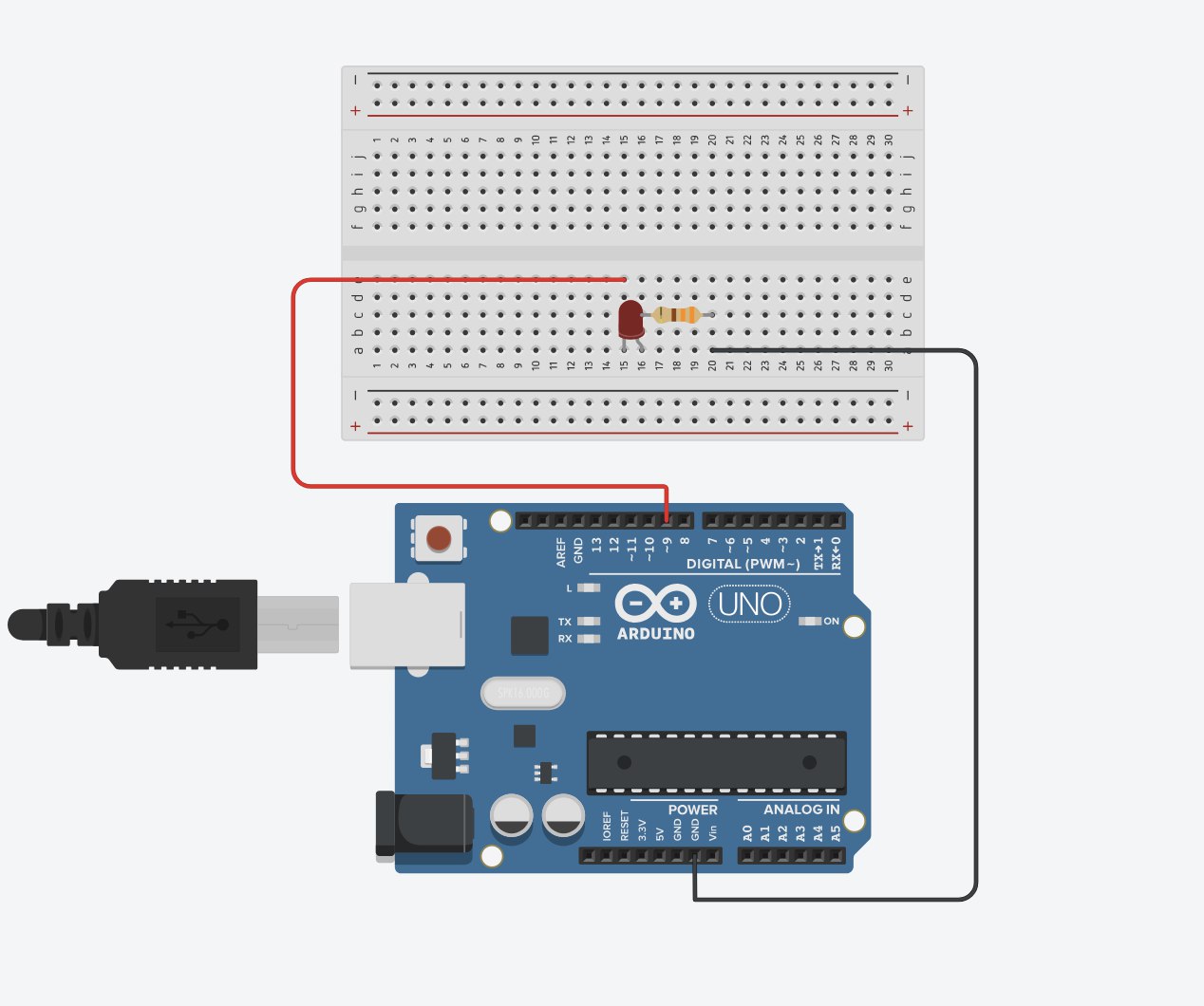
Controlling brightness of LED on p5.js using mouseX position
https://drive.google.com/file/d/1F5u96LDEvKJTtBuD6cbVIIlCcqiFUnyZ/view?usp=sharing
// Holds the brightness value we will send to the Arduino
let brightness = 0;
// Stores any data received back from Arduino (not used, but required)
let latestData = "";
function setup() {
// Create the canvas where visual feedback will appear
createCanvas(600, 400);
noStroke();
}
function draw() {
// Clear the screen each frame with a black background
background(0);
// Convert trackpad/mouse X position (0 → width) into brightness (0 → 255)
brightness = int(map(mouseX, 0, width, 0, 255));
// Draw a rectangle whose fill intensity matches the brightness value
fill(brightness);
rect(0, 0, width, height);
// If a serial port is active, send the brightness value to the Arduino
if (serialActive) {
writeSerial(brightness + "\n"); // "\n" ensures Arduino reads full numbers
}
// If serial is NOT open, show instructions to the user
if (!serialActive) {
background("purple");
fill("white");
textSize(28);
text("Press SPACE to choose Serial Port", 20, 40);
}
}
function keyPressed() {
// Press SPACE to open the Web Serial port selection dialog
if (key === " ") {
setUpSerial();
}
}
// This function is REQUIRED by p5.webserial
// It receives data sent from Arduino (even if unused)
function readSerial(data) {
if (data) latestData = data;
}
// Sends data to Arduino IF the writer is available
function writeSerial(value) {
if (writer) {
writer.write(value);
}
}
int ledPin = 9;
int brightness = 0;
void setup() {
Serial.begin(9600);
pinMode(ledPin, OUTPUT);
}
void loop() {
if (Serial.available() > 0) {
brightness = Serial.parseInt();
brightness = constrain(brightness, 0, 255);
}
analogWrite(ledPin, brightness);
}
Task 3:
Potentiometer to control the direction of the wind and LED light when when ball bounces
https://drive.google.com/file/d/1x8fewdACiGBJ0Qv7vc6tiyZ5ukW19EtK/view?usp=sharing
int LED = 9;
int POT = A0;
void setup() {
Serial.begin(9600);
pinMode(LED, OUTPUT);
// Test the LED
digitalWrite(LED, HIGH);
delay(500);
digitalWrite(LED, LOW);
}
void loop() {
int p_value = analogRead(POT); // read from the potentiometer
int move = map(p_value, 0, 1023, -1, 2); // map the value to -1, 0, and 1
Serial.println(move);
if (Serial.available() > 0) {
// read from p5.js
int touch = Serial.parseInt();
// set the LED command
if (touch == 1) {
digitalWrite(LED, HIGH);
} else {
digitalWrite(LED, LOW);
}
}
}
let velocity;
let gravity;
let position;
let acceleration;
let wind;
let drag = 0.99;
let mass = 50;
let on = 0;
function setup() {
createCanvas(640, 360);
//noFill();
position = createVector(width/2, 0);
velocity = createVector(0,0);
acceleration = createVector(0,0);
gravity = createVector(0, 0.5*mass);
wind = createVector(0,0);
}
function draw() {
background(255);
if (!serialActive) {
text("Click on the Screen to select Serial Port", 20, 30);
} else {
text("Connected", 20, 30);
}
applyForce(wind);
applyForce(gravity);
velocity.add(acceleration);
velocity.mult(drag);
position.add(velocity);
acceleration.mult(0);
ellipse(position.x,position.y,mass,mass);
if (position.y > height-mass/2) {
velocity.y *= -0.9; // A little dampening when hitting the bottom
position.y = height-mass/2;
}
// turn on the LED only when it's on the ground or hits the ground
if(position.y == height-mass/2){
on = 0;
}else{
on = 1;
}
}
function applyForce(force){
// Newton's 2nd law: F = M * A
// or A = F / M
let f = p5.Vector.div(force, mass);
acceleration.add(f);
}
function keyPressed(){
if (key==' '){
mass=random(15, 80);
position.y=-mass;
velocity.mult(0);
}
}
function mousePressed() {
setUpSerial();
}
function readSerial(data) {
if (data != null) {
// make sure there is actually a message
// split the message
wind.x = data;
//////////////////////////////////
//SEND TO ARDUINO HERE (handshake)
//////////////////////////////////
let sendToArduino = on + "\n";
writeSerial(sendToArduino);
}
}
Reflection
I generally liked on working and understanding underlying concepts behind how to the Arduino and p5.js sketches work together. I already see my progress being able to understand how pins work and how to connect each sensor properly. I wanted to avoid using distance sensor because I used it for the last project. We worked together with Aizhan, and used AI a bit for the third task to helps us understand how gravity and velocity worked, and it helped us come up with a code to connect potentiometer as a wind.