
Main Concept:
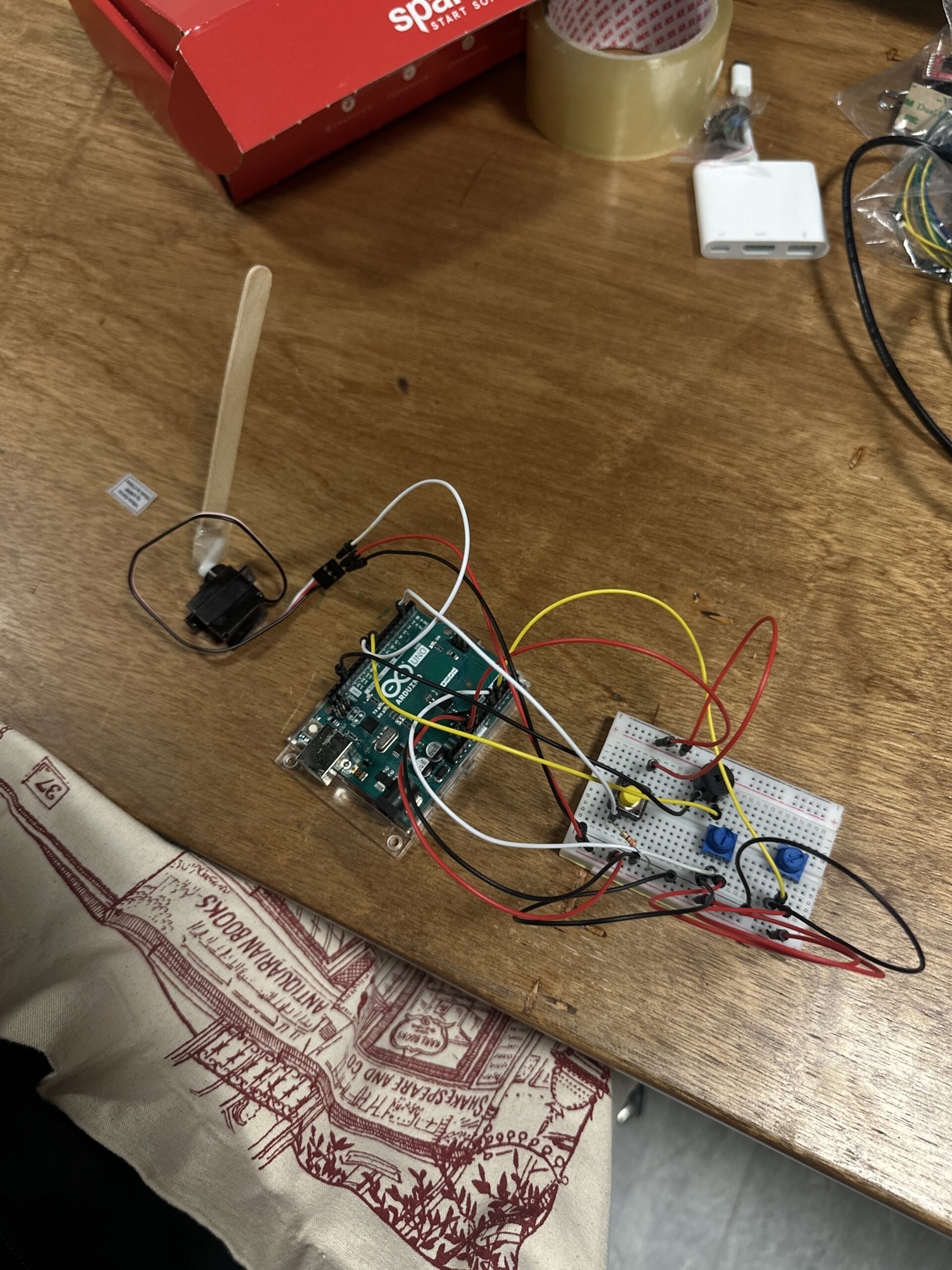
The main concept for our group project is a DJ, since we wanted to experience what it feels like to be one. A DJ needs to handle many sounds and instruments using their unique artistic skills to create music that makes people happy and excited. Thus, we crafted this device called “NYUAD DJ Kit.” By using it, you can choose different kinds of songs with various speeds and a base sound produced by a wooden stick. This is a unique way to compose new kinds of songs as a DJ.
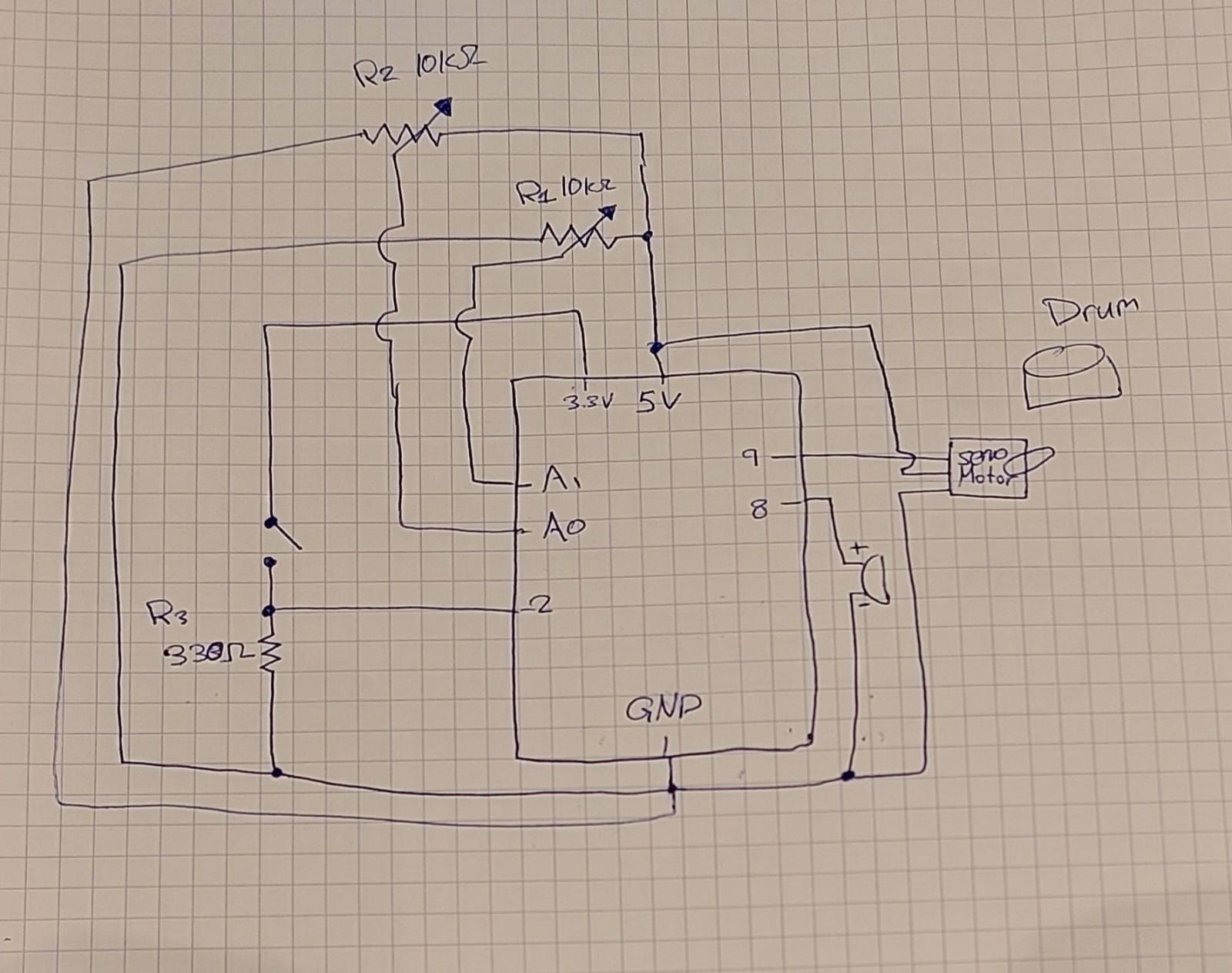
Schematic:
Code we’re particularly proud of:
The parts of the code we’re most proud of are the one shown below. The if else statement allows us to move to the next song and play it. When the button is pressed, meaning the pin is low, we set buttonPressed to true and noteIndex to 0 so that the song plays from the beginning. We also used the modulo operator to ensure that we always go back to the first song after the last one. The else if statement resets the buttonPressed state to false, so that the next time we press the button, it plays the next song.
//handle music switching using modulo
if (digitalRead(BUTTON_PIN) == LOW && !buttonPressed) {
buttonPressed = true;
//move to the next song
currentSong = (currentSong + 1) % 3;
//set note to 0 so that a song plays from the beginning
noteIndex = 0;
isPlaying = false;
noTone(BUZZER_PIN);
delay(250); //delay for 250 milliseconds
} else if (digitalRead(BUTTON_PIN) == HIGH) {
//set buttonPressed to false to play next song
buttonPressed = false;
}
The second snippet of code allows the servo to move every servoDelay milliseconds, controlling its speed and angle. We applied the concept we learned in class called “non-blocking” to ensure that this operation does not affect the rest of the program. Inside the if statement, we use the write() function from the Servo library to change the servo’s angle each time it runs. This way, the servo continues changing its angle until it reaches either 180° or 0°, incrementing by a step each time servoDelay milliseconds have passed. We’re happy that we were able to apply multiple concepts we learned in class, such as non-blocking and modulo, to our DJ project. As references, we used the example file ToneMelody from the Digital section and the Knob example from the Servo library. We also used ChatGPT to help us figure out how to apply the non-blocking concept so that the melody can move to the next one without affecting the rest of the program, which allows the servo to continue moving smoothly.
//Use non-blocking to not affect the rest of the program
if (currentTime - lastServoUpdate >= servoDelay) { //if servoDelay mills has passed
lastServoUpdate = currentTime;
//Change the angle of the servo by servoPos
myservo.write(servoPos);
servoPos += servoStep;
//Start decrementing if servo reaches 0 or 180 degrees
if (servoPos >= 180 || servoPos <= 0) servoStep = -servoStep;
}
Link to GitHub: https://github.com/KimShota/Intro-to-IM/blob/13b494508781fc36c9b95d3b46e5145d18c06808/nyuad_dj.ino
Reflections & Future Improvements:
In terms of reflections, we struggled a lot to make the base work because we needed to attach the wooden stick to the servo and it was not stable at all at first. The way we attached it was by using tape, which was the primary cause of why it was unstable. As a result, every time we ran the servo fast, the stick fell off or the servo stopped working for some reason. We eventually managed to make the stick and servo stable by placing some weight on top of the setup so that no matter how fast the servo moved, the stick remained stable.
As for future improvements, we want to enhance the quality of the base because right now we’re just using a wooden stick, and it doesn’t produce a loud enough sound for a party situation. Furthermore, as the stick swings faster, its swing range becomes smaller, so we need to move the bottle manually to allow the stick to reach it. We believe this happens because the servoDelay becomes too small, reaching about 1 ms, so the servo can’t physically keep up. Therefore, next time we should use constrain() on the mapped value to prevent electrical noise from going out of range. This way, we can allow the servo to catch up with the speed that we want.