
Introduction:
Growing up in a South Asian country, I consumed American Media – films, documentaries, comedy skits, and even FOX News for my daily dose of reliable news. It was during this time that I happened to have been introduced to the carnival game of ‘Cornhole’ during a KSN-TV’s broadcast on Kansas country-side fair. A mix of basketball and golf with a southern dialect to it – I found it to be fascinating. It was so fascinating that when I was overwhelmed by so many ideas to choose from for this final project, I decided to go with a ‘Canon Powered’ Cornhole Game. Instead of tossing by hand, participants decide orientation in X and Y axis, and let the canon shoot out the corn bag. In our case, it would be a small sack filled with weight.

Canon:
The canon would be a 3d printed model. Not big, just about big as my Week 9’s canon. Yes, this is a continuation of that project! That was a candy canon that moved in X axis. This is a fully functional canon with loading and reloading capabilities!
The sketches below visualizes the working and highlights the basic design of the canon. The first one shows how to concept is imagined to be. The canon releases the inside barrel powered by an elastic material having stored the elastic potential energy. That potential energy is released and converted into kinetic energy. This kinetic energy and speed coupled with momentum results in impulse provided to the sack which turns its inertia to a trajectory.

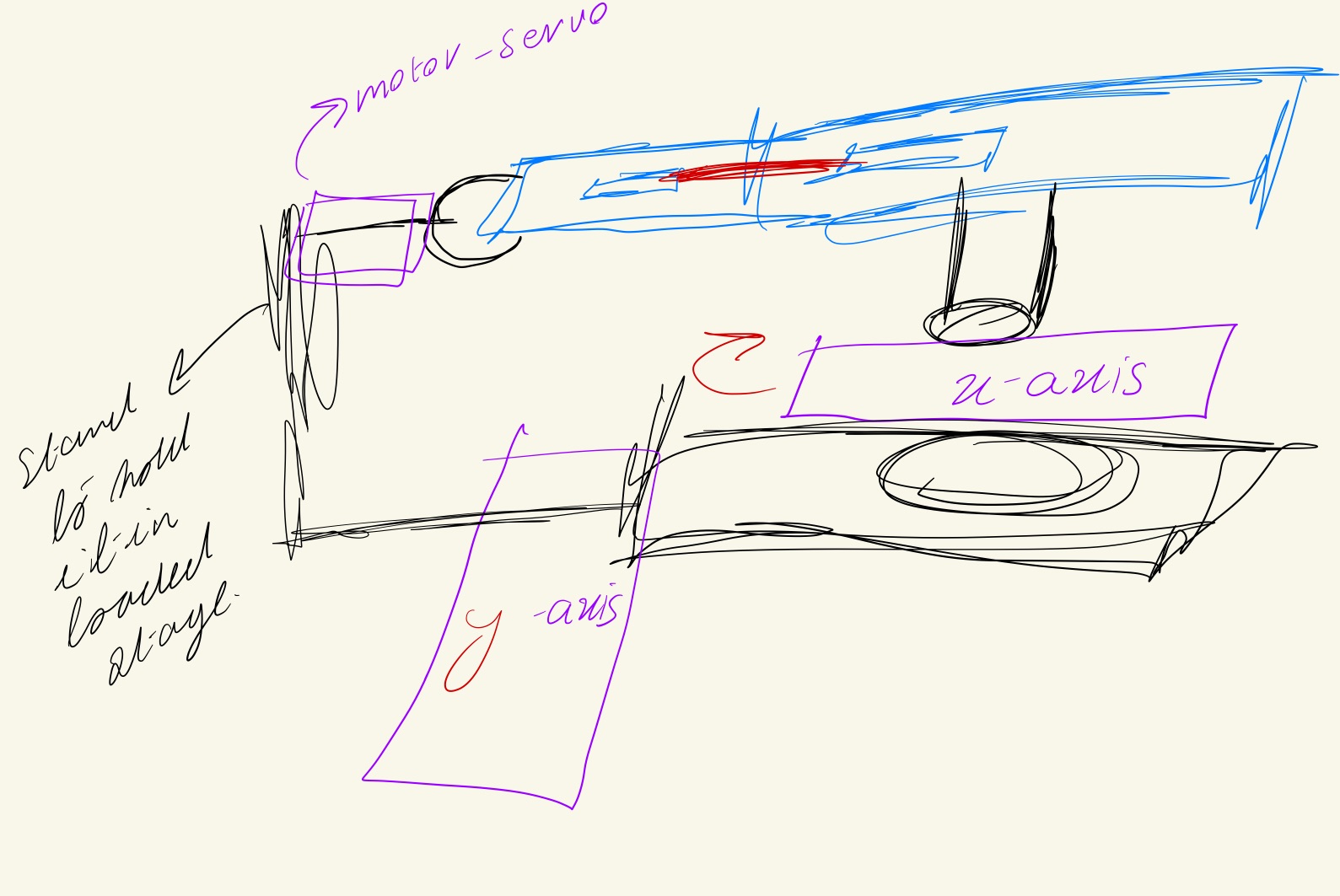
The side view demonstrates the use of two motors, one oriented for x-axis movement and the other one for y-axis movement.
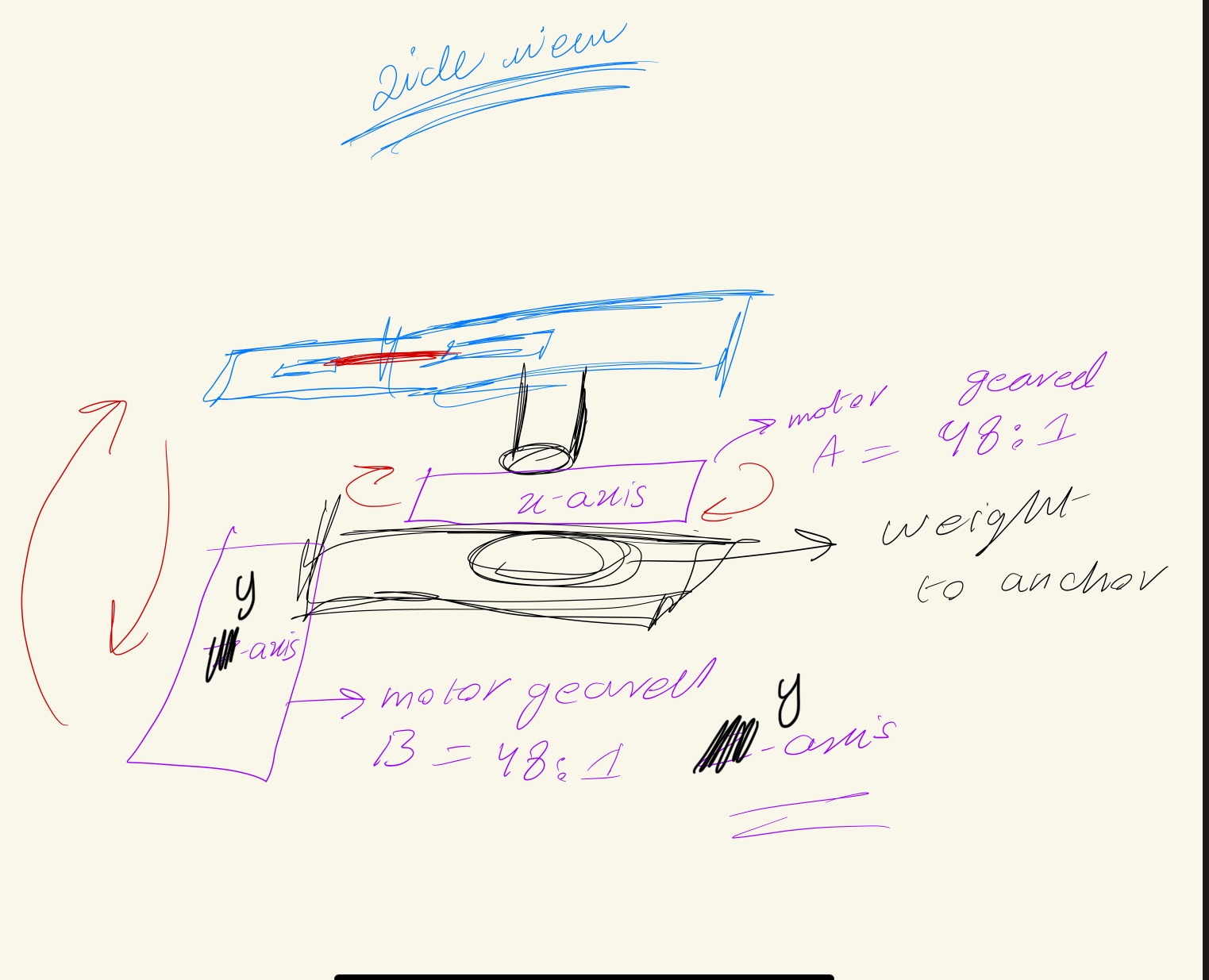
The supported stand on the left end with a claw-like grappler helps keep the canon loaded. Upon trigger, it will release and let the tension of the elastic loose which will lead to forward release mechanism.
Arduino and P5 Program :
The movement of this canon will be controlled by gyroscope mounted on to gym-gloves. The gloves will also have the flex sensors, so that with hand tilt and movement, corresponding movement along x and y-axis will take place. When the hands are clenched , it will result to the release mechanism being triggered. A pressure sensor will be put underneath the hole/target to detect if the ball/sack has landed. The p5 program will first start off with a menu with screen offering the user to play or go over instructions. This game will be both in virtual and real domain. The game will start with a 1 minute counter. For each corn in the hole, user will get response on the screen with animation and led will light up, while also points would increase. When in reload state, the user won’t be able to move the robot, this is for convenience as to prevent user from mistakenly moving the robot while reloading. Once the game ends, the robot stops moving and the highscore displayed.
The arduino will control the movement of the three motors as an output signal (PWM), with last one being a servo, it will take input from the gyroscope and flex sensor for the controls. The Pressure sensor under the cornhole will trigger point system and this will be conveyed to the P5 program by and after having read by the Arduino. The state of servo motor will be conveyed to the p5 program as well. In return, the p5 will communicate back the permission or the kill-switch condition to start or stop the program. It will process and display the state (i.e launch or reload), and will show the points alongside the timmer. I will add in safety nets too to prevent the machine from turning too much and breaking the structure/casing. Last but not the least, it will shutdown the connection between the gloves and the motors once the game has concluded.