Group members: Genesis & Nikita
Concept:
video
“WALL-E’s Violin” is inspired by the character WALL-E from the popular animated movie. The idea behind “WALL-E’s Violin” is to mimic WALL-E expressing emotion through music, specifically through a violin — a symbol of sadness and nostalgia. A cardboard model of WALL-E is built with an ultrasonic distance sensor acting as his eyes. A cardboard cutout of a violin and bow are placed in front of WALL-E to represent him holding and playing the instrument.
As the user moves the cardboard stick (the “bow”) left and right in front of WALL-E’s “eyes” (the ultrasonic sensor), the sensor detects the distance of the bow. Based on the distance readings, different predefined musical notes are played through a piezo buzzer. These notes are chosen for their slightly melancholic tones, capturing the emotional essence of WALL-E’s character

To add a layer of animation and personality, a push-button is included. When pressed, it activates two servo motors attached to WALL-E’s sides, making his cardboard arms move as if he is emotionally waving or playing along. The mechanical hum of the servos blends into the soundscape, enhancing the feeling of a robot expressing music not just through tones, but with motion — like a heartfelt performance from a lonely machine.
How it Works:
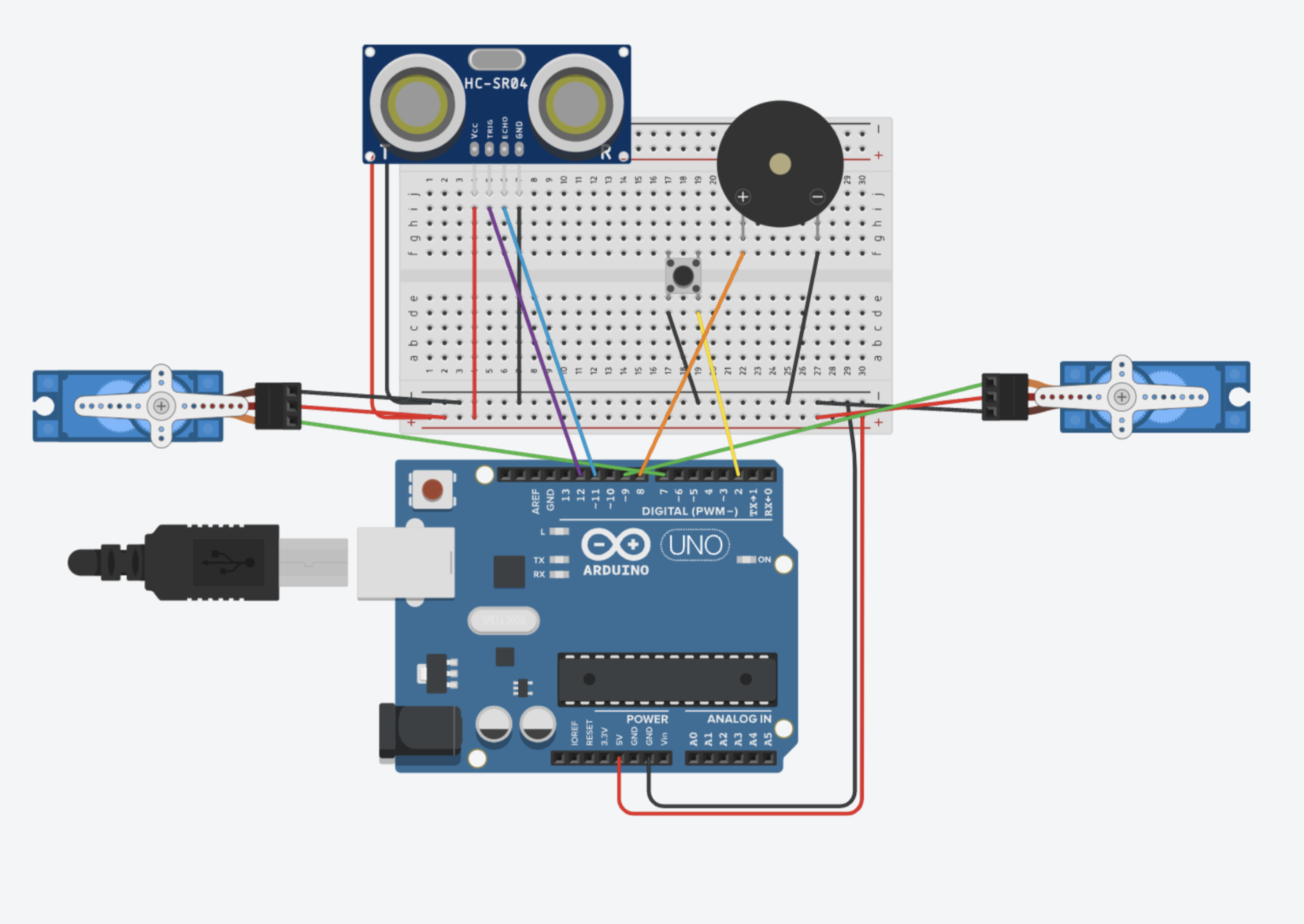
- Ultrasonic Sensor: Acts as WALL-E’s eyes. It continuously measures the distance between the robot and the cardboard bow moved in front of it.
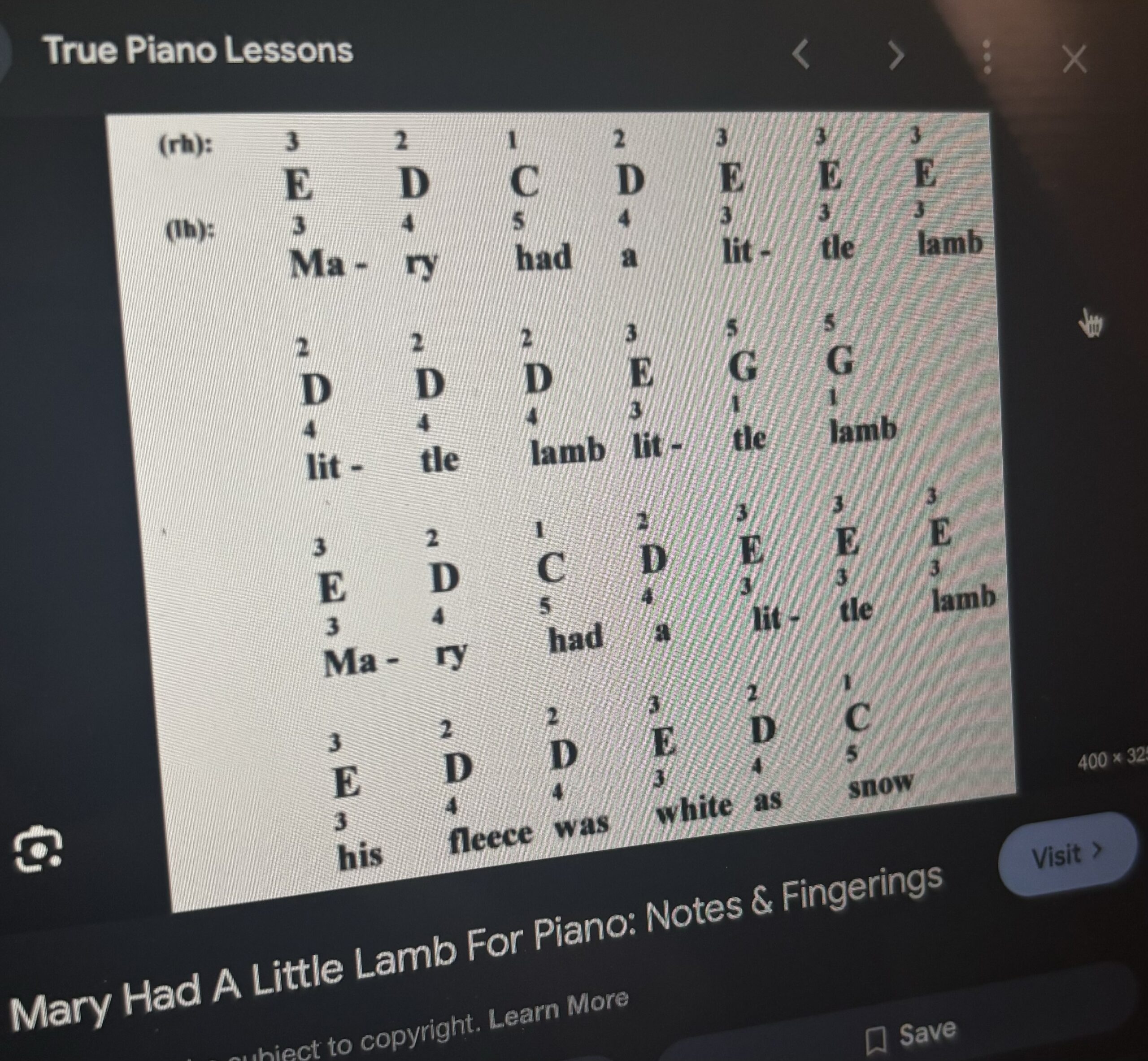
- Note Mapping: The Arduino interprets the measured distances and maps them to specific, predefined musical notes. These notes are chosen to sound melancholic and emotional, fitting WALL-E’s character.
- Piezo Buzzer: Plays the corresponding musical notes as determined by the distance readings. As the user sways the bow, the pitch changes in real time, simulating a violin being played.
- Servo Motors + Button: Two servo motors are connected to WALL-E’s arms. When the button is pressed, they animate his arms in a waving or playing motion. The sound of the servos adds a robotic texture to the performance, further humanizing the character and blending physical movement with audio expression.
Code:
#include <Servo.h>
#include <math.h>
// Pin Assignments
const int trigPin = 12; // Ultrasonic sensor trigger
const int echoPin = 11; // Ultrasonic sensor echo
const int buzzerPin = 8; // Buzzer output
const int buttonPin = 2; // Button input for servo tap
const int servoPin = 9; // First servo control pin (default starts at 0°)
const int servoPin2 = 7; // Second servo control pin (default starts at 180°)
Servo myServo; // First servo instance
Servo myServo2; // Second servo instance
// Bittersweet Melody Settings
int melody[] = {
294, 294, 370, 392, 440, 392, 370, 294
};
const int notesCount = sizeof(melody) / sizeof(melody[0]);
// Sensor to Note Mapping Parameters
const int sensorMin = 2; // minimum distance (cm)
const int sensorMax = 30; // max distance (cm)
int currentNoteIndex = 0;
// Vibrato Parameters
const float vibratoFrequency = 4.0;
const int vibratoDepth = 2;
// Timer for vibrato modulation
unsigned long noteStartTime = 0;
void setup() {
// Initialize sensor pins
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
// Initialize output pins
pinMode(buzzerPin, OUTPUT);
pinMode(buttonPin, INPUT_PULLUP);
// Initialize the first servo and set it to 0°.
myServo.attach(servoPin);
myServo.write(0);
// Initialize the second servo and set it to 180°..
myServo2.attach(servoPin2);
myServo2.write(180);
// Initialize serial communication for debugging
Serial.begin(9600);
// Get the initial note based on the sensor reading
currentNoteIndex = getNoteIndex();
noteStartTime = millis();
}
void loop() {
// Get the new note index from the sensor
int newIndex = getNoteIndex();
// Only update the note if the sensor reading maps to a different index
if (newIndex != currentNoteIndex) {
currentNoteIndex = newIndex;
noteStartTime = millis();
Serial.print("New Note Index: ");
Serial.println(currentNoteIndex);
}
// Apply vibrato to the current note.
unsigned long elapsed = millis() - noteStartTime;
float t = elapsed / 1000.0; // Time in seconds for calculating the sine function
int baseFreq = melody[currentNoteIndex];
int modulatedFreq = baseFreq + int(vibratoDepth * sin(2.0 * PI * vibratoFrequency * t));
// Output the modulated tone
tone(buzzerPin, modulatedFreq);
// Check the button press to trigger both servos (movement in opposite directions).
if (digitalRead(buttonPin) == LOW) {
tapServos();
}
delay(10);
}
// getNoteIndex() measures the sensor distance and maps it to a note index.
int getNoteIndex() {
int distance = measureDistance();
// Map the distance (between sensorMin and sensorMax) to the range of indices of the array (0 to notesCount-1).
int index = map(distance, sensorMin, sensorMax, 0, notesCount - 1);
index = constrain(index, 0, notesCount - 1);
return index;
}
// measureDistance() triggers the ultrasonic sensor and calculates the distance in cm.
int measureDistance() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
long duration = pulseIn(echoPin, HIGH);
int distance = duration * 0.034 / 2;
return constrain(distance, sensorMin, sensorMax);
}
// tapServos() performs a tap action on both servos:
// - The first servo moves from 0° to 90° and returns to 0°.
// - The second servo moves from 180° to 90° and returns to 180°.
void tapServos() {
myServo.write(90);
myServo2.write(90);
delay(200);
myServo.write(0);
myServo2.write(180);
delay(200);
}
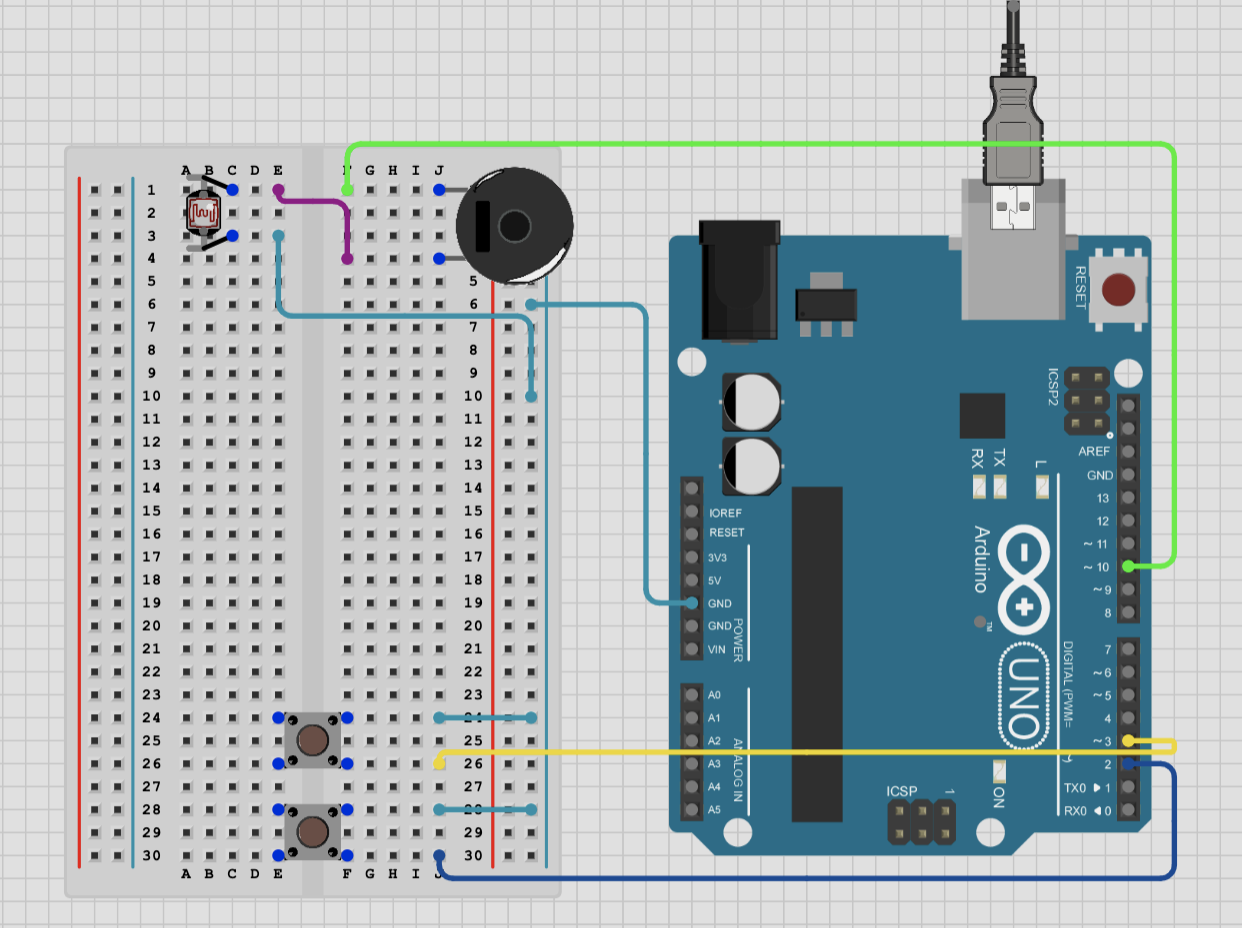
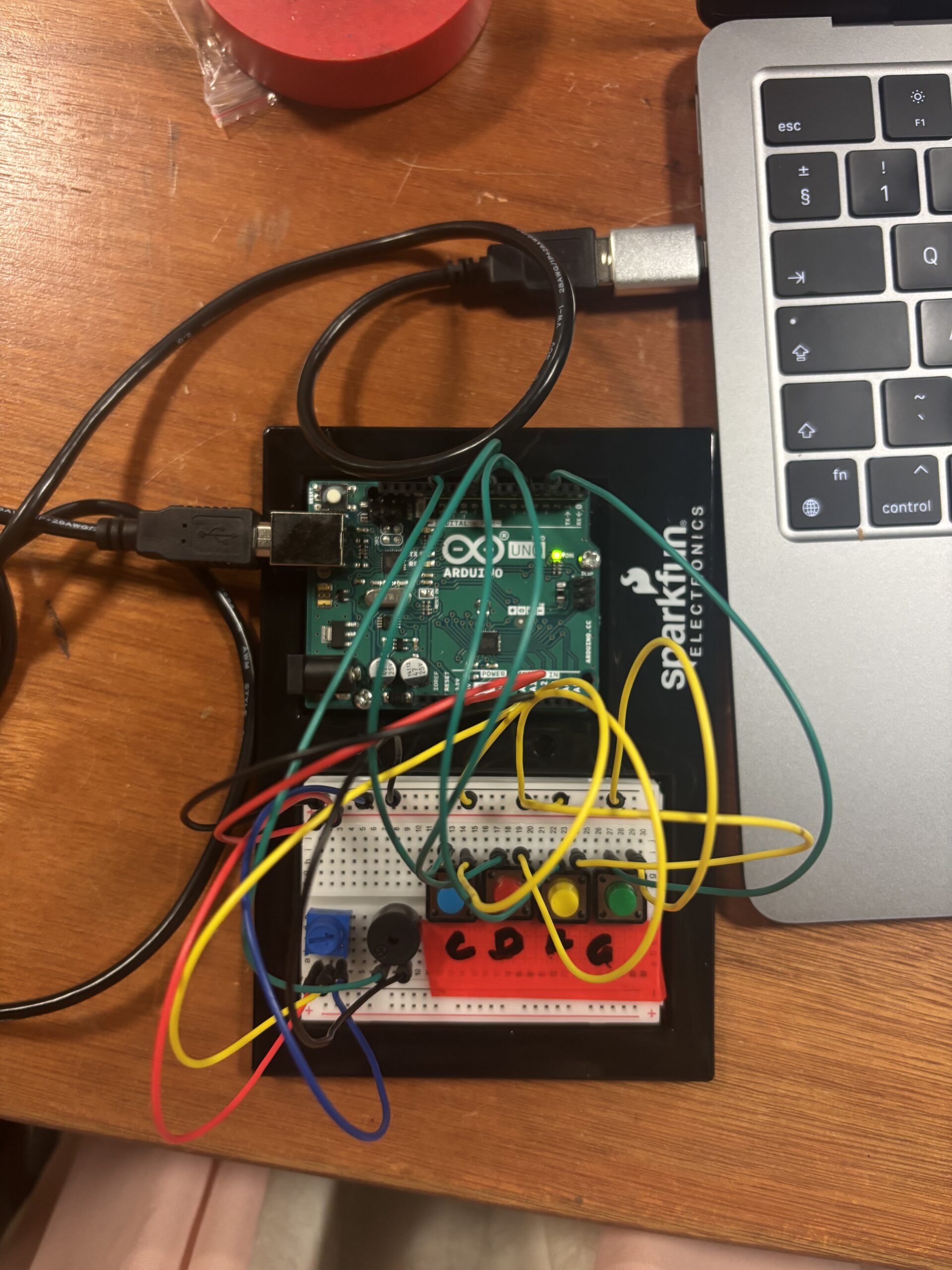
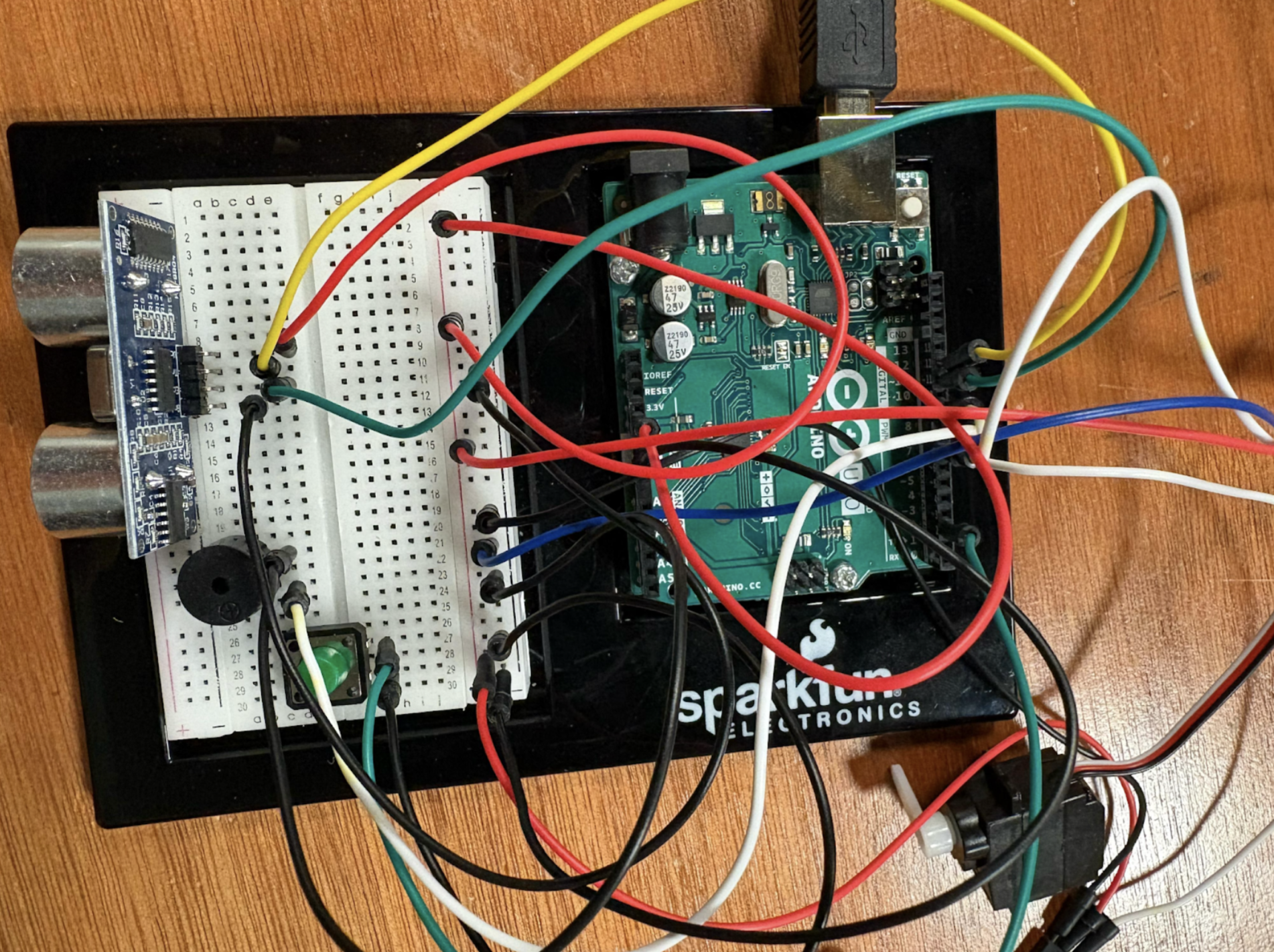
Circuit:
Future Improvements:
-
- Add more notes or an entire scale for more musical complexity.
- Integrate a servo motor to move the arm or head of WALL-E for animation.
- Use a better speaker for higher-quality sound output.
- Use the LED screen to type messages and add to the character.
 But I wanted to keep things happy and do just that part of mice following him in my preferred aesthetic- a night sky. In my version, a glowing dot represents the Piper, and mice randomly appear and start following it. But they’re not just mindless followers—if you move your mouse, you can actually distract them!
But I wanted to keep things happy and do just that part of mice following him in my preferred aesthetic- a night sky. In my version, a glowing dot represents the Piper, and mice randomly appear and start following it. But they’re not just mindless followers—if you move your mouse, you can actually distract them!