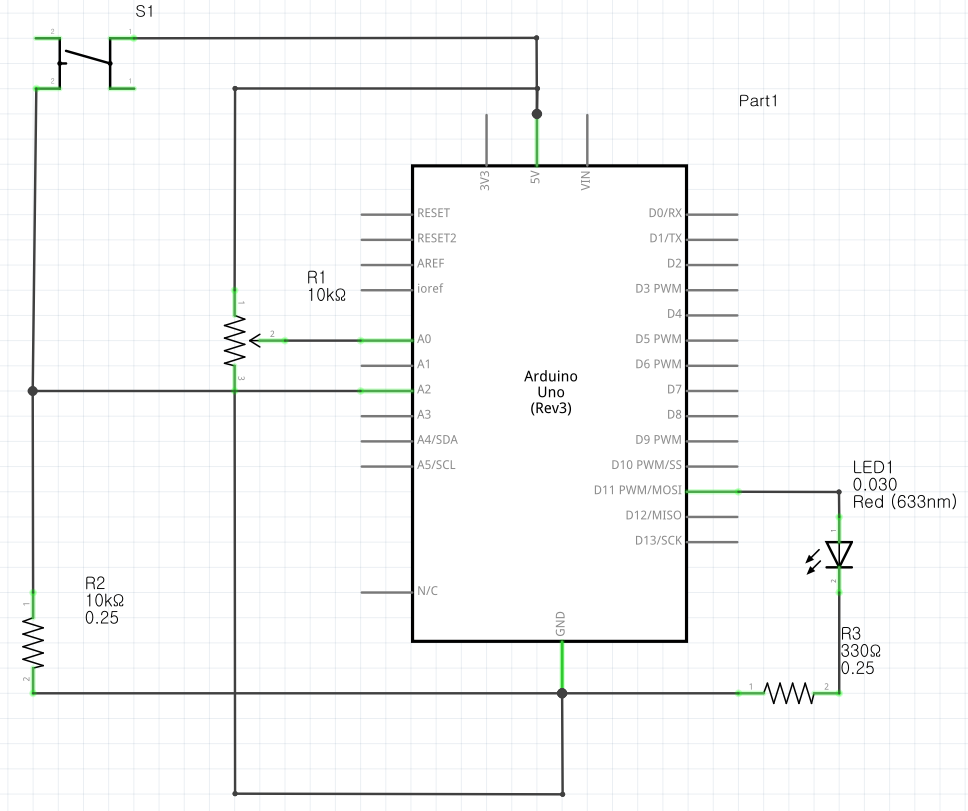
The schematic is made to be compatible throughout the assignment.
This schematic is used for Exercise 2.
Exercise 1:
make something that uses only one sensor on arduino and makes the ellipse in p5 move on the horizontal axis, in the middle of the screen, and nothing on arduino is controlled by p5
Arduino Code (Credit: Hessa):
void setup() {
Serial.begin(9600); // initialize serial communications
}
void loop() {
// read the input pin:
int potentiometer = analogRead(A0);
// remap the pot value to fit in 1 byte:
int mappedPot = map(potentiometer, 0, 1023, 0, 255);
// print it out the serial port:
Serial.write(mappedPot);
//Serial.println(mappedPot);
// slight delay to stabilize the ADC:
delay(1);
}
Exercise 2:
make something that controls the LED brightness from p5
Arduino Code (Credit: Aisha):
int LED = 5;
void setup() {
Serial.begin(9600);
pinMode(LED, OUTPUT);
// start the handshake
while (Serial.available() <= 0) {
Serial.println("Wait"); // send a starting message
delay(300); // wait 1/3 second
}
}
void loop() {
// wait for data from p5 before doing something
while (Serial.available()) {
int brightness = Serial.parseInt();
if (Serial.read() == '\n') {
analogWrite(LED, brightness); // turn on LED and adjusts brightness
Serial.println("LIT");
}
}
}
While brainstorming, I was trying to recall what interactive projects I’ve interacted with and enjoyed. I feel like key components that draw me personally to a project are the outcome, music, and how the body is used in the project.
My preliminary idea for the final project is to take the classic 2000s mobile game, Fruit Ninja, and make it live. If you’re not familiar with Fruit Ninja, it’s a timed game where the player has to slice as many fruits as they can using their finger(s). There are combos, bombs, and special fruits in the game, but to keep it relatively simple for implementation I will probably just have the player be able to slice one fruit at a time.
The physical component will be instead of the player using just their finger, they will use their whole body. For instance when they see a fruit coming, they will have to slice it using their arms. This might use the distance sensor. Another possible idea is to have multiple buttons, one representing each fruit, scattered around so the player will have to move to get the button.
I’m not sure if I will stick to this idea, but for now live Fruit Ninja will be what I’m going for.
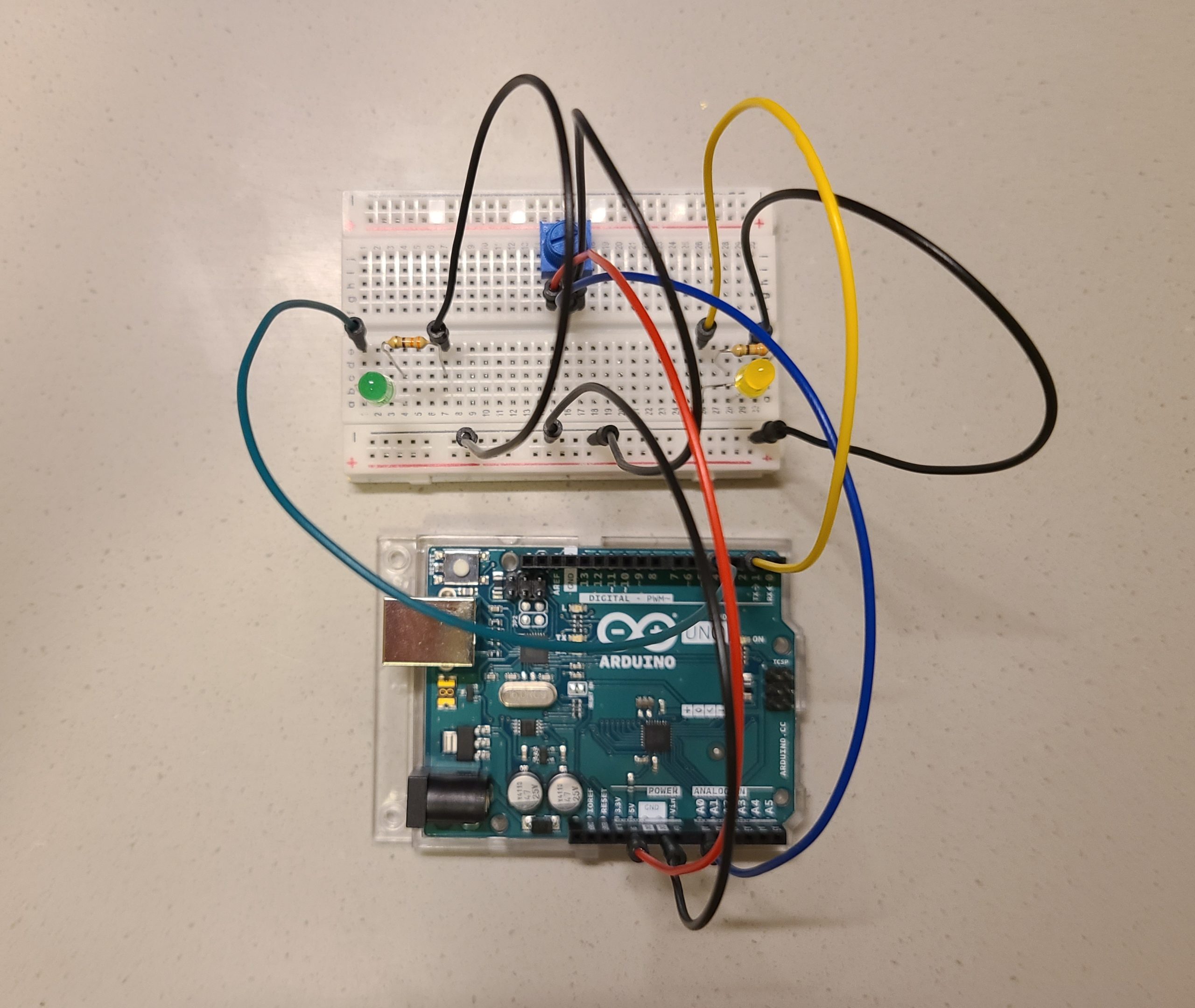
Here is the actual physical circuit and schematic we used for all three exercises. The actual physical circuit has two LEDs, one at pin 2, but it wasn’t illustrated because it wasn’t used, it was just there for testing purposes.
Physical circuit
Schematic (another LED at pin 2)
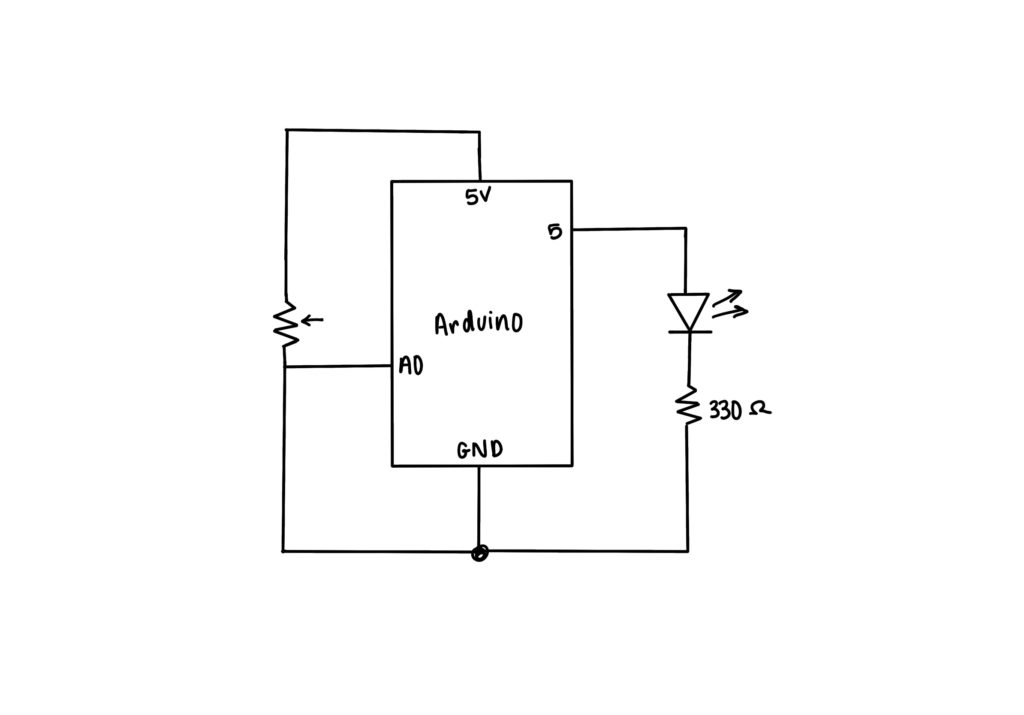
Exercise 1: Ellipse
Here is the link to the full code. It uses professor Sherwood’s example “Webserial Handshake” code, except it includes this line:
which maps the rVal to the x-position of the ellipse. Since the rVal reads from the Arduino, the ellipse x-position also changes as the sensor is being used. We used a potentiometer to control this.
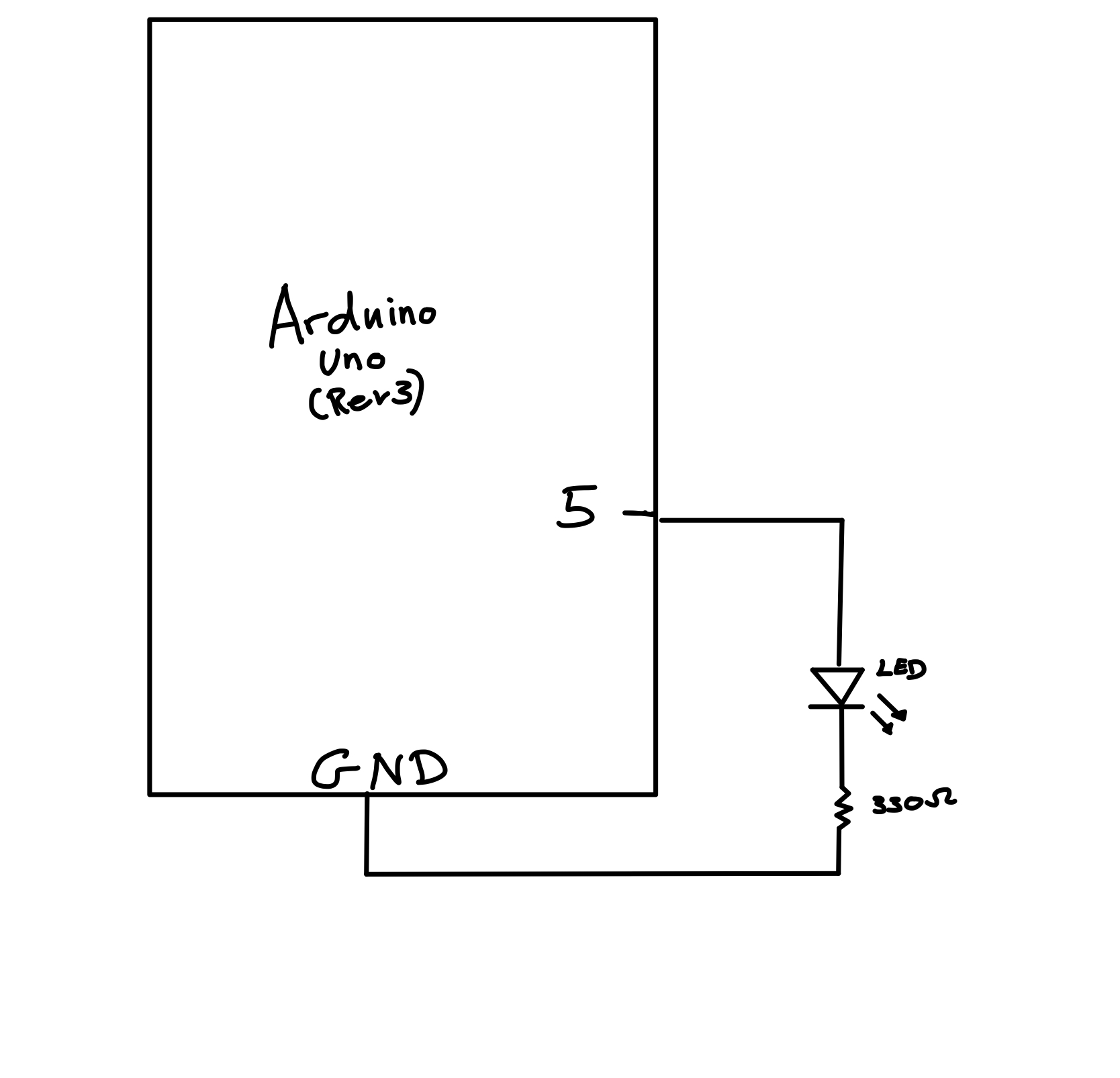
Exercise 2: LED Brightness
Here is the link to the full code. At first we tried using up and down arrow keys, but we changed it to mouse click and then the mouseX position. So, for this exercise, we controlled the brightness of the LED using the mouseX position, where we mapped it to the values for the LED:
LEDBrightness = map(mouseX, 0, width, 0, 255);
We wanted it to be changing constantly, like how a potentiometer changes the LED constantly, but it didn’t work out that way. We tried printing the values and it turns out that the mouseX value is sent to the Arduino only once, so it doesn’t always get sent. However, when printing the LEDBrightness, it is constantly being checked.
Additionally, another version we tried was using the left and right halves of the canvas to change the brightness by using mouse input. The left side would make the LED dimmer, whereas the right side was the full brightness. This was used as a way of simplifying the program. The issue we ran into with this method was that the LED would be full brightness when clicking the right half, but when clicking the left half it would barely light up, even when the value for left was the same as the right value.
Exercise 3: Gravity Wind with Potentiometer and LED
Here is the link to the code. The code for this exercise uses Professor Mang’s example and the gravity wind example from Professor Sherwood with a few modifications. Firstly, there are boundaries set so the ball does not go out of the canvas. This is the code that checks if the ball bounces and then the LED will light up:
if (position_.y > height - mass/2 - mass) {
if (velocity.y > 1) {
serial.write(255);
}
}
It checks if the position of the ball hits the bottom edge of the canvas. It also checks if the ball is still bouncing based on the velocity.
And this is the code from the Arduino side for the LED:
Since we just used serial.write() in p5, when we Serial.read() it takes the value in the serial write (which is 255) and we use that to write to the LED.
As for the potentiometer that controls the wind, here is the code for it in p5:
So for our project, we wanted to do something artistic. The idea we have comes from the following piece of computer graphic art: Interactive Walls. The artwork is graphic and based on the software Max, but we thought it would look great if implemented with servo motors and multicolored panels in real life. The panels will be mounted to servo motors and be multicolored to look aesthetically pleasing. The panels can be made out of acrylic material or something lighter like thin plywood or cardboard. Due to restrictions of the Arduino Uno, we will only be able to use a maximum of 12 panels for our interactive artwork.
Concept visualization and further explanation can be found in Ahmed’s post
Functionality
We want the panels to depict a living, breathing, organism that reacts to different inputs; touch, noise, and input controls on a mounted panel. The artwork will have two speakers that will create a surround sound effect and output predetermined responses to different stimuli. The control panel for the artwork will have a few buttons that will change modes. Modes can be an ambient mode that makes predetermined patterns, music mode which will make the artwork react to music playing, and a touch mode that will allow the audience to touch the artwork and have it react to their inputs.
Additional Information
We also found the following code that may help us during the production of this project: Audio Reactive Program
Etch a Sketch is a simple drawing tool. Users can rotate two knobs to alter x and y positions of a drawing dot, creating a continuous drawing. To erase the drawn image, users have to shake the board.
Brainstorming
Creating an Arduino version of Etch and Sketch does not seem to be too difficult, so I am thinking of a few things that make the Arduino version somewhat unique. However, there are a few guidelines I would like to maintain:
Since it is a drawing tool, the control of the dot has to be precise.
Related to (1), the final product should be intuitive to use.
So, the Arduino version of Etch and Sketch will likely have potentiometers to act as knobs and a button to erase the drawing. The below is the list of additional features that may or may not be implemented in my project:
3D. Introducing another drawing axis, people can create a 3D drawing. However, this may be a challenging task, and other features may not be implemented if I focus on creating this.
Partial erasing. Similar to how texts are erased on smartphones, people will be able to undo their drawing, and erasing will become faster if keep erasing.
Color/stroke thickness.
Pause/Resume drawing. Similar to lifting a pen to draw things on another side, the drawing of the dot may pause and resume at any time. Maybe this can be implemented with the color feature using RGBA.
Hopefully, unlike my midterm project, the final product of this project will be not too complex.
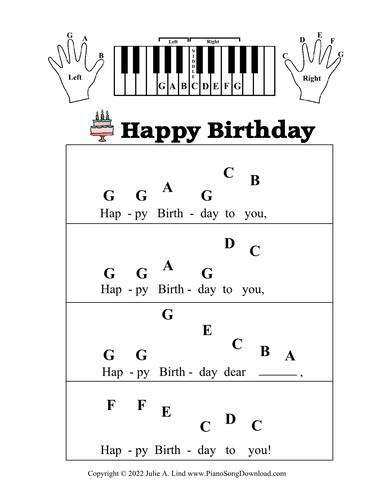
For this week’s assignment, we wanted to design a mini piano using switch buttons. Our goal was to make each button have a different note so that when users play the piano they can recreate the sound from the “Happy Birthday” song. We also added a potentiometer to our circuit so that we could regulate the volume of the sound.
Image of notes:
To build the circuit we added switch buttons and resistors and connected the wires to the pins. We downloaded pitches from examples→toneKeyboard, each switch button had its own musical note from the song(C5, B4, A4, G4, D5). We struggled a bit with adding potentiometer and piezo buzzer to our circuit with piano buttons, however we managed to solve the problems and understand the process.
At the beginning we initialized the piano buttons, buzzer and potentiometer. Next, we went on to add the code for the buzzer and potentiometer. We wrote code to read the input on the analog pin and turn the piezo buzzer on and off. Also, we set a tone for each button and activated it. To improve this work, next time we can add more buttons and play new songs:)
Analog input and output is a fundamental concept in electronics and microcontrollers, such as the Arduino. In this project, we will be using analog input and output to control a pair of LEDs, one red and one blue, which will mimic the flashing lights of a police car. This will be achieved by using a sensor, such as a motion sensor, to detect when a hand is waved in front of the LEDs. The reason for choosing this particular project is to gain a better understanding of analog input and output, as well as to create a fun and interactive project using the Arduino. By using a sensor to control the flashing of the LEDs, we can create a sense of realism and add an extra layer of interactivity to the project.
Reflections and improvements:
As someone who enjoys tinkering with gadgets and technology, working on an analog input and output project was a lot of fun for me. I was excited to see how the switch would work and how the output would be displayed on the screen. Unfortunately, the video of my project got corrupted and I was unable to show the switch in action (when pressed while the motion sensor was used the LED would flash).
Despite this setback, I was still happy with how the project turned out. The analog input and output functioned exactly as I had expected, and I was able to learn a lot about how these types of systems work. I enjoyed the process of building and testing the project, and it was satisfying to see it all come together in the end.
Looking back, there are a few things I would do differently if I had the chance to work on this project again. For one, I would make sure to back up the video of the project before showing it to others. This way, if something goes wrong with the video, I would still have a copy of it to refer to.
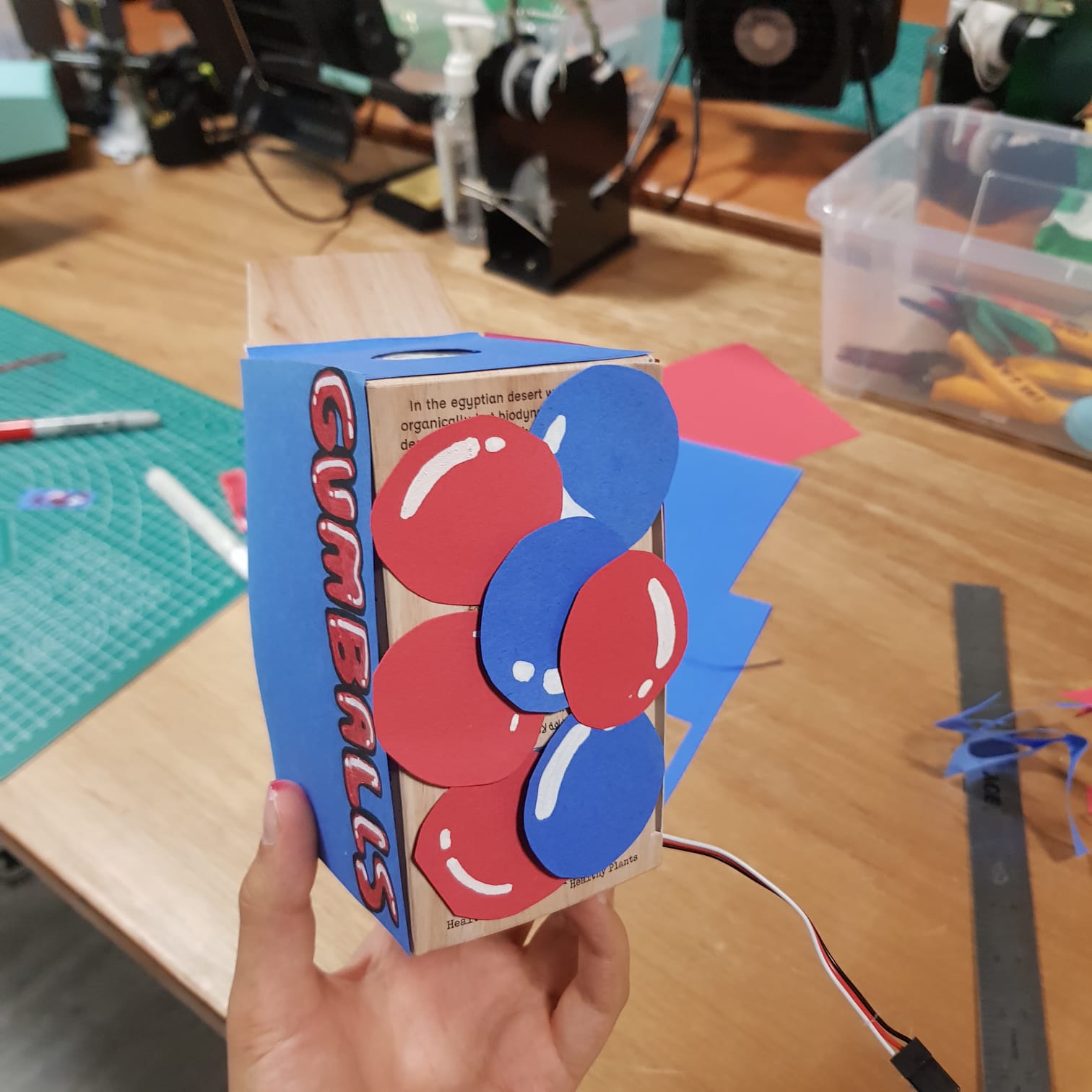
Our idea for the musical instrument was to use sounds that the servo motor created rather than incorporating the piezo buzzer. So, we decided to try and recreate a gumball machine and the sound it makes when the gumballs fall out of the machine.
The Physical Design Process
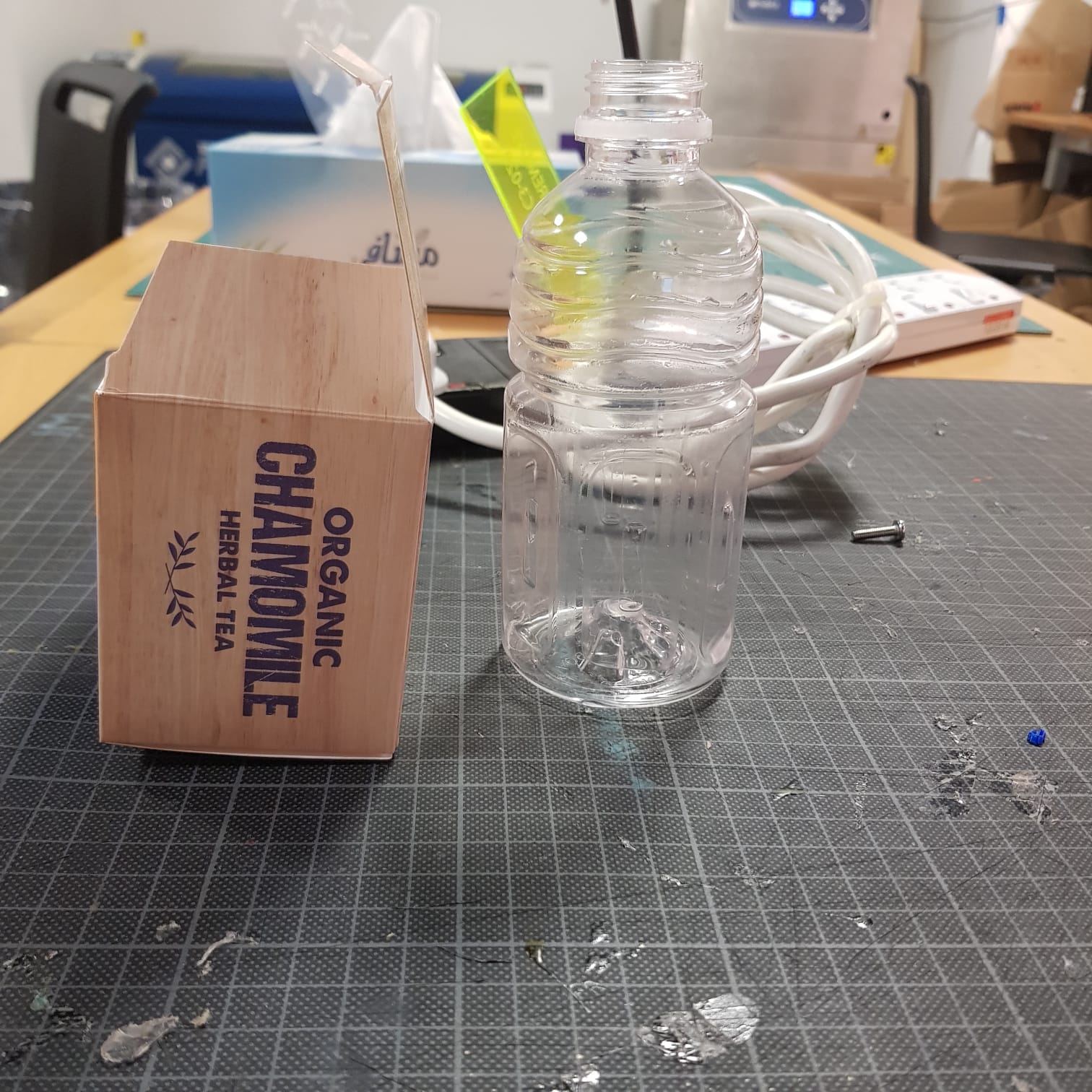
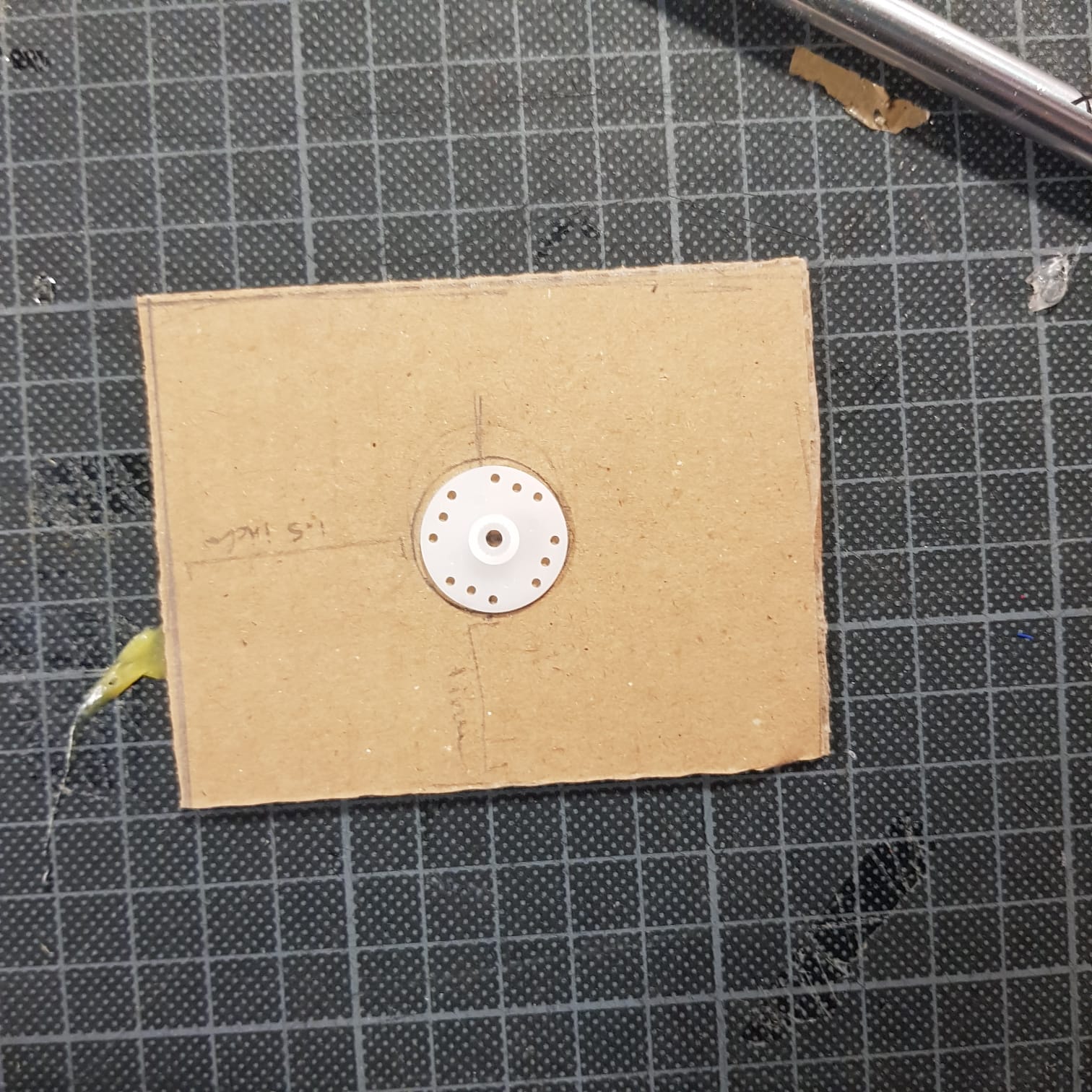
We built the structure using a box, water bottle and cardboard. We then prepared the servo motors and prepared a cardboard piece to act as a ball stopper to control the amount of balls that fall through the hole.
Box and water bottle for the structureServo motor ball stopper
We attached the servo motor and started testing out the servo motor with balls made from different materials to see what sound they made. We also decided to create two ramps for the balls to slide on to make more sound. As for the materials, we used pipe-cleaners, paper, and marbles. We found that the marbles made the best sound and rolled nicely down the ramp. The paper balls made a decent sound, whereas the pipe-cleaners were almost silent when they fell.
We attached the servo motor and started testing out the servo motor with balls made from different materials to see what sound they made. We also decided to create two ramps for the balls to slide on to make more sound. As for the materials, we used pipe-cleaners, paper, and marbles. We found that the marbles made the best sound and rolled nicely down the ramp. The paper balls made a decent sound, whereas the pipe-cleaners were almost silent when they fell.
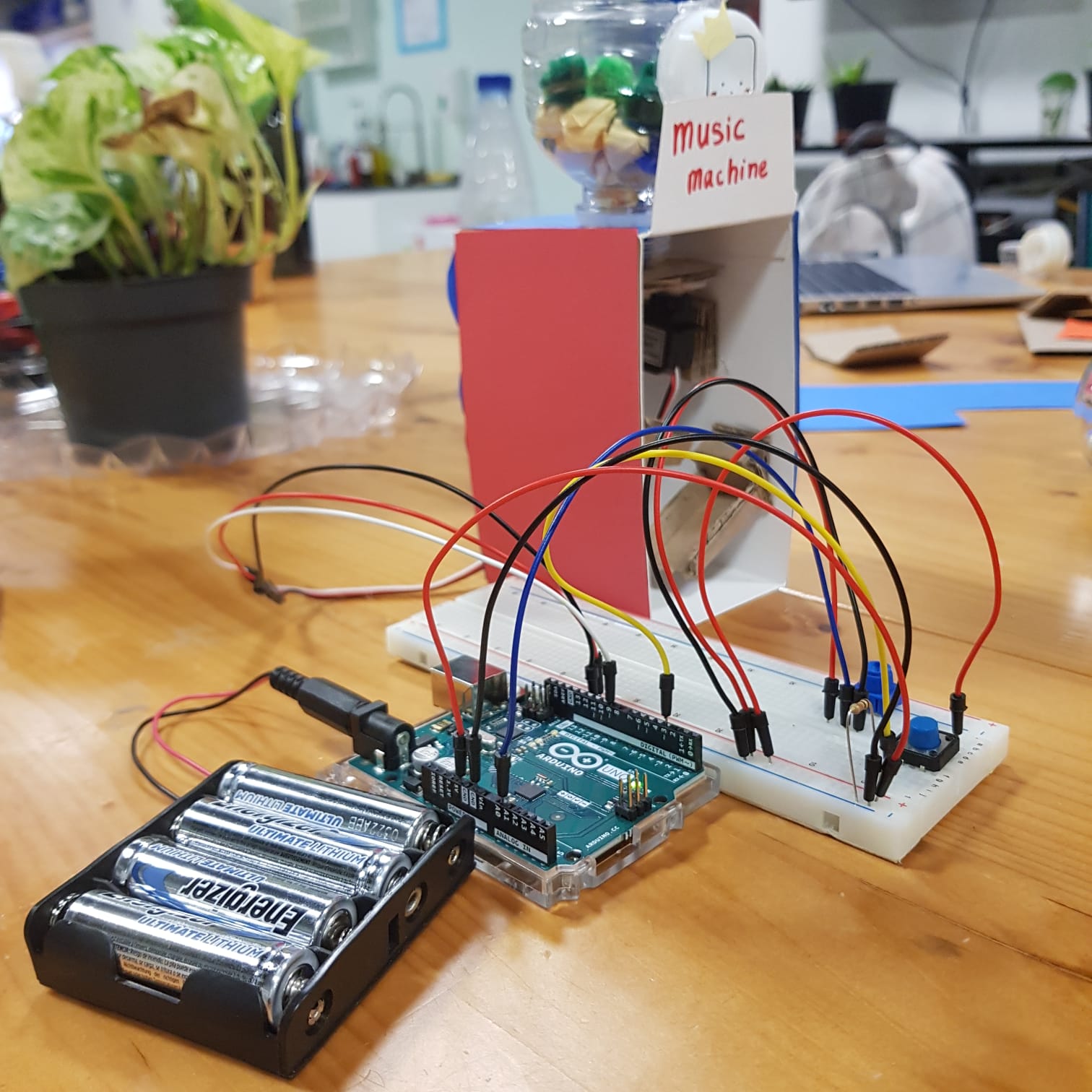
Here is the final version of the physical components:
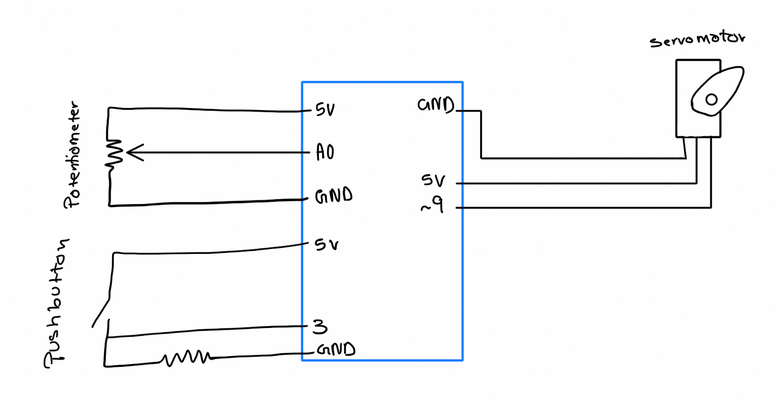
And here is the schematic of our circuit:
Some things that didn’t work out as expected…
Our initial plan was to have the balls fall down one by one, but that didn’t work as expected. The balls either fell together when the ball stopper opened, or they would get stuck even when the stopper opened. When they do fall down, most of the time they wouldn’t roll down the ramps as intended. Usually, the balls would fall to the side, fall straight down, or when it does fall on the slide it wouldn’t roll all the way down and it would get stuck on the ramp. In this case, the marbles worked best since they were smooth spheres, but the marbles also had the problem with falling to the side. Additionally, at first we wanted the stopper to open and close continuously after one button press, but currently it just does the cycle once and you have to keep pressing the button for the continuous opening and closing.
The Coding Process
For implementing the sensors, we decided to use a push button and potentiometer. We used the button to control the servo motor, which either blocks or unblocks the hole where the balls fall out of. When it is open the balls fall out, and when it is closed the balls are stopped. To do this we used 2 if statements that checked if the button is clicked once, in which case the lever is opened, and if the button is clicked again then the lever is closed again.
We experimented with the delay, and the number for the position of the servo motor. If we made the delay longer, the servo motor would take longer to reach the position. Moreover, since the potentiometer controls the speed of the servo motor, when the potentiometer is at the maximum number, the servo motor moves faster, but since the delay is longer it doesn’t seem as fast. When the delays were all set to 15 and the potentiometer was at the maximum, the servo motor didn’t sweep the full amount (i.e. it didn’t complete the number of degrees in the for loop). While this was experimental, we ended up liking the sound it created and the movements of it.
Finally, here are a few different videos of our music machine!
This one is the first code, where one press opens and the other press closes it:
This one all the delay amounts are the same. We didn’t experiment with the potentiometer for this version, but the sound was nice:
This one has one long delay:
And this final one we tested with just marbles and shortened the long delay, which was in the previous video:
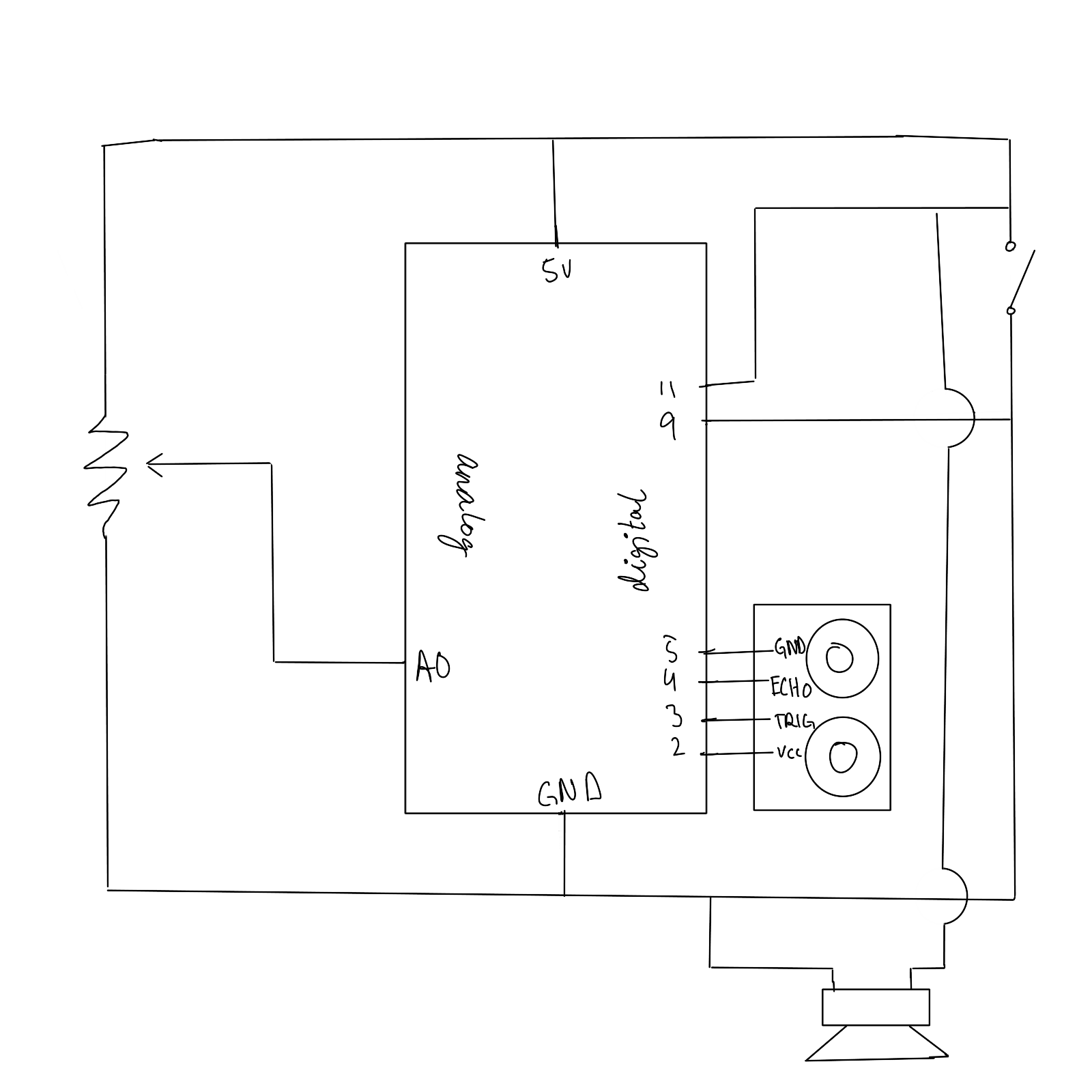
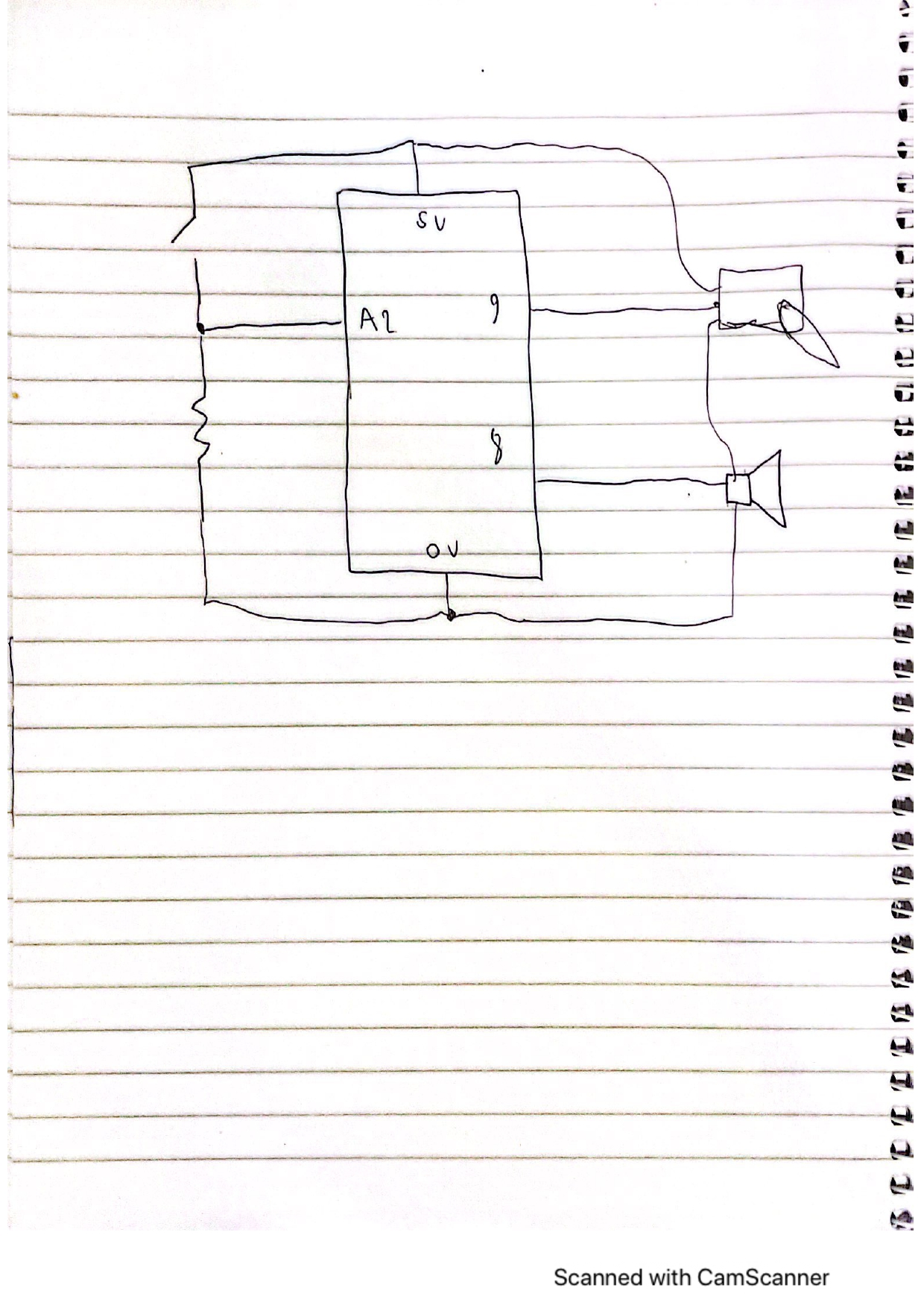
Honestly, we had some trouble brainstorming for this assignment at first. We weren’t sure what instrument to create or mimic and how. However, after watching a video about the theremin we decided to make an instrument that would react to the distance between our hands and some sensor. We also wanted to recreate the drone of old midi modulating synths.
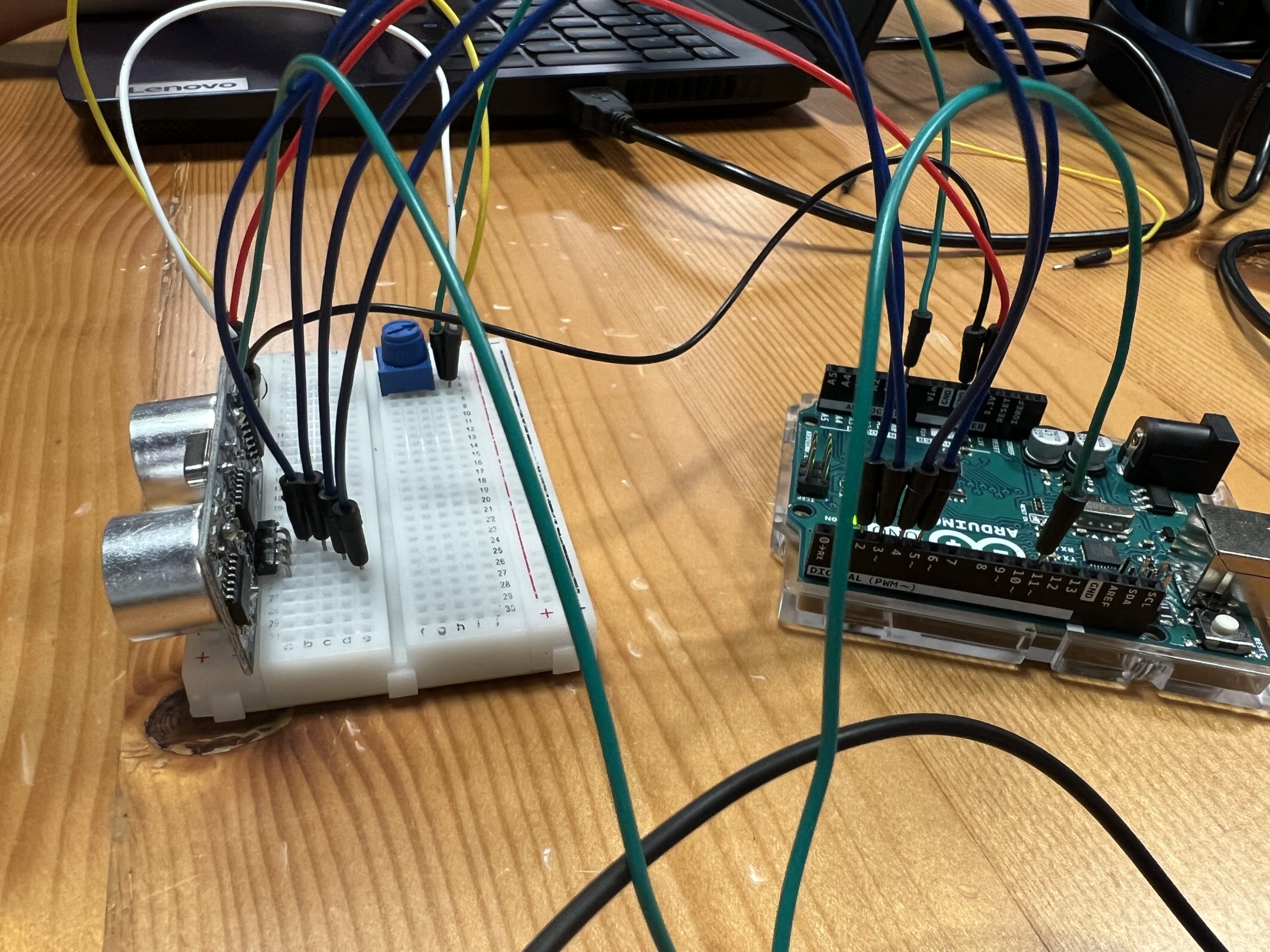
For that, we needed to use an ultrasonic distance finder and the HC-SR04 sensor in our kit was perfect for that. Also, we wanted to be able to control the itch of the sound being produced so we used a potentiometer for that. We decided to use a speaker available at the IM lab, a switch, and an enclosure to build the whole project.
Brainstorming:
While looking for inspiration and knowledge necessary for implementing our idea we came across the following youtube video that outlined how to make a simple ‘instrument’ using an ultrasonic distance sensor:
This video allowed us to build a device that could convert distance measurements into different musical notes.
After this, we used some other sources to understand better the use of ultrasonic distance sensors and also how to integrate switches and potentiometers into the circuit:
For the code, it was a bit difficult to figure out how to use the ultrasonic range finder at first. We had to figure out how to convert time to distance since the sensor needs to listen for a pulse from an object to return and the returning pulse is proportional to the distance of the object from the sensor. Luckily, we found exactly what we were looking for in a tutorial on the internet. However, it was calibrated for a few meters instead of a few inches. We needed something that was more sensitive and produced a different set of frequencies. We decided that we would do that by reducing the maximum distance to a few inches and increasing the sensitivity. We also tweaked the code to put the speaker in a continuous loop instead of just beeps to give us a more synth-esque sound.
The sensor itself was difficult to calibrate but after referring to the aforementioned sources we were able to discover some useful functions like the delayMicroseconds() and microsecondstoInches()
// The ping is triggered by a HIGH pulse of 2 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
pinMode(3, OUTPUT);// attach pin 3 to Trig
digitalWrite(3, LOW);
delayMicroseconds(2);
digitalWrite(3, HIGH);
delayMicroseconds(5);
digitalWrite(3, LOW);
cm = microsecondsToCentimeters(duration);
For the potentiometer, we added the following code to make it emit certain frequencies of sound depending on the position of the knob:
after hooking it up to the speaker this is what it sounded like:
However, we were still missing a key feature of the assignment which was a button to control the sound output. For that, we used the following simple line of code to detect whether the signal output from the switch was HIGH or not:
buttonState = digitalRead(buttonPin);
if (buttonState == HIGH)
If this statement was held true, it would continue the loop that would initialize the ultrasonic distance sensor and then output a sound signal depending on the position of the hands.
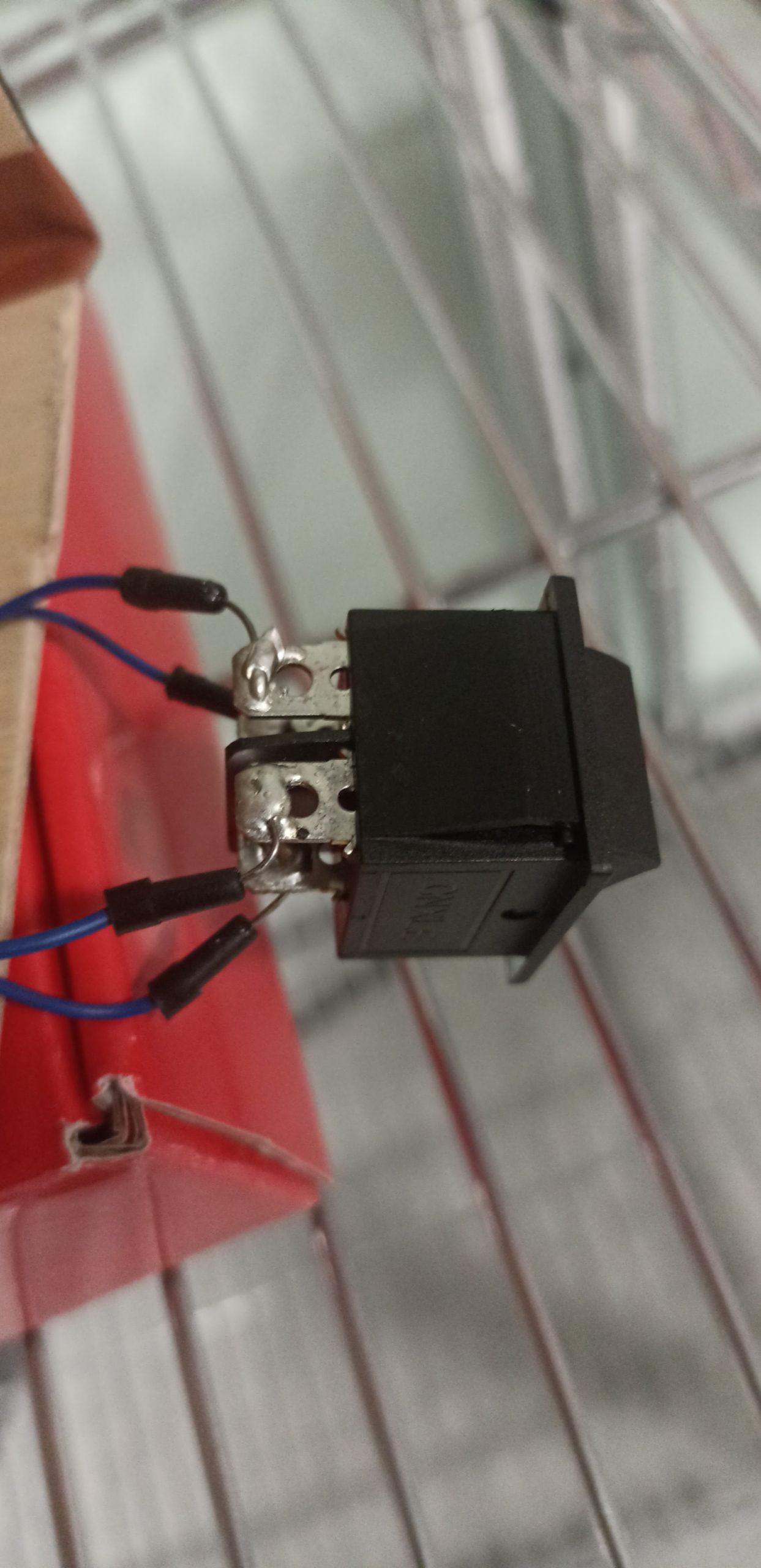
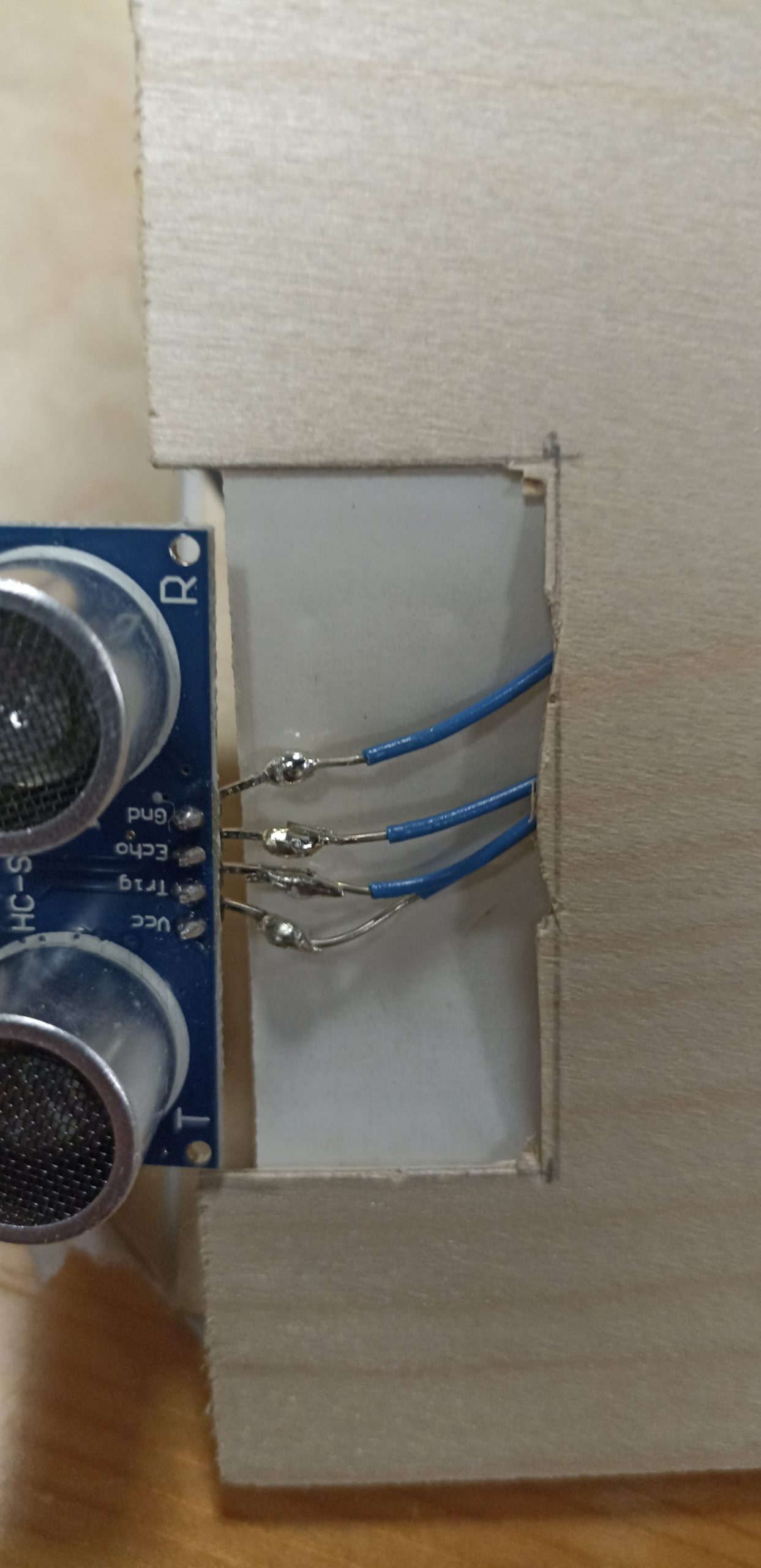
To connect the wires to the button and the ultrasonic distance sensor we had to solder the wires to ensure a strong and secure connection:
This project was a lot of fun for both of us. We both learned some important information about using distance sensors and the inbuilt functionality of Arduino IDE that helps make a lot of information processing very easy as a programmer. We also had to solder which was a new experience and allowed us to gain important hands-on knowledge in building practical circuits. Some of the difficulties we faced included code optimization and building usable circuits.
We also learned the importance of top-down development in building circuits; we used a multitude of resources and examples and our own creativity to create circuits with a lot of unnecessary parts. After tinkering and experimenting we were able to streamline not only our circuit to be as simple as functionally possible while losing no part of the usability.
With complex circuits, we discovered that cable management was very important and some of our components were regularly shorting. to reduce this effect we used tape and insulators but it was still far from perfect. Additionally, we could have used heat-shrinking insulating wraps to create better insulation.
Also, we had trouble using the buttons available in the kit because they were pushing buttons and not permanent switches. The fix was super easy thankfully and only required replacement parts that we found in the lab. The button initially would turn the whole board off but that was only because we hooked up the wires the wrong way.
In this assignment I worked with Mohamed to design a musical instrument using the arduino and breadboard. We used two main devices which are the piezo speaker and the servo motor. We decided to play the song “We will we will rock you” on the piezo buzzer, and then provide sound effects after that using the servo motor, by rotating it clockwise and counter-clockwise. The code to do this is shown below. Here is a schematic for our implementation.
#include "pitches.h"
#include <Servo.h>
// notes in the melody:
int melody[] = {
NOTE_C4, NOTE_A3, NOTE_C4, NOTE_A3, 0, NOTE_G3, NOTE_G3,NOTE_G3
};
// note durations: 4 = quarter note, 8 = eighth note, etc.:
int noteDurations[] = {
2, 2, 2, 2, 4, 4,4
};
Servo myservo;
int pos = 0;
void setup() {
// iterate over the notes of the melody:
}
void loop() {
bool switchState=digitalRead(A3);
if(switchState){
for (int thisNote = 0; thisNote < 8; thisNote++) {
int noteDuration = 1000 / noteDurations[thisNote];
tone(8, melody[thisNote], noteDuration);
myservo.attach(9);
int pauseBetweenNotes = noteDuration * 1.30;
delay(pauseBetweenNotes);
// stop the tone playing:
noTone(8);
}
myservo.write(180); // tell servo to go to position in variable 'pos'
delay(1000*1.3); // waits 15ms for the servo to reach the position
myservo.write(0); // tell servo to go to position in variable 'pos'
delay(1000*1.3); // waits 15ms for the servo to reach the position
}
}
As seen in the above code, we tried to make the sound effects that come from the servo motor sound better, by making the delay time between the rotations equal to the pause time between the notes. To control the musical instrument, we used a digital input which is a switch that should be pressed each time to play the sounds again
We really liked how the output looked like, but we believe that we can improve on it by making the servo motor be controlling an object like a drum stick when it is rotating to make it sound as a better musical instrument. Here is a video that shows our implementation.