
Concept
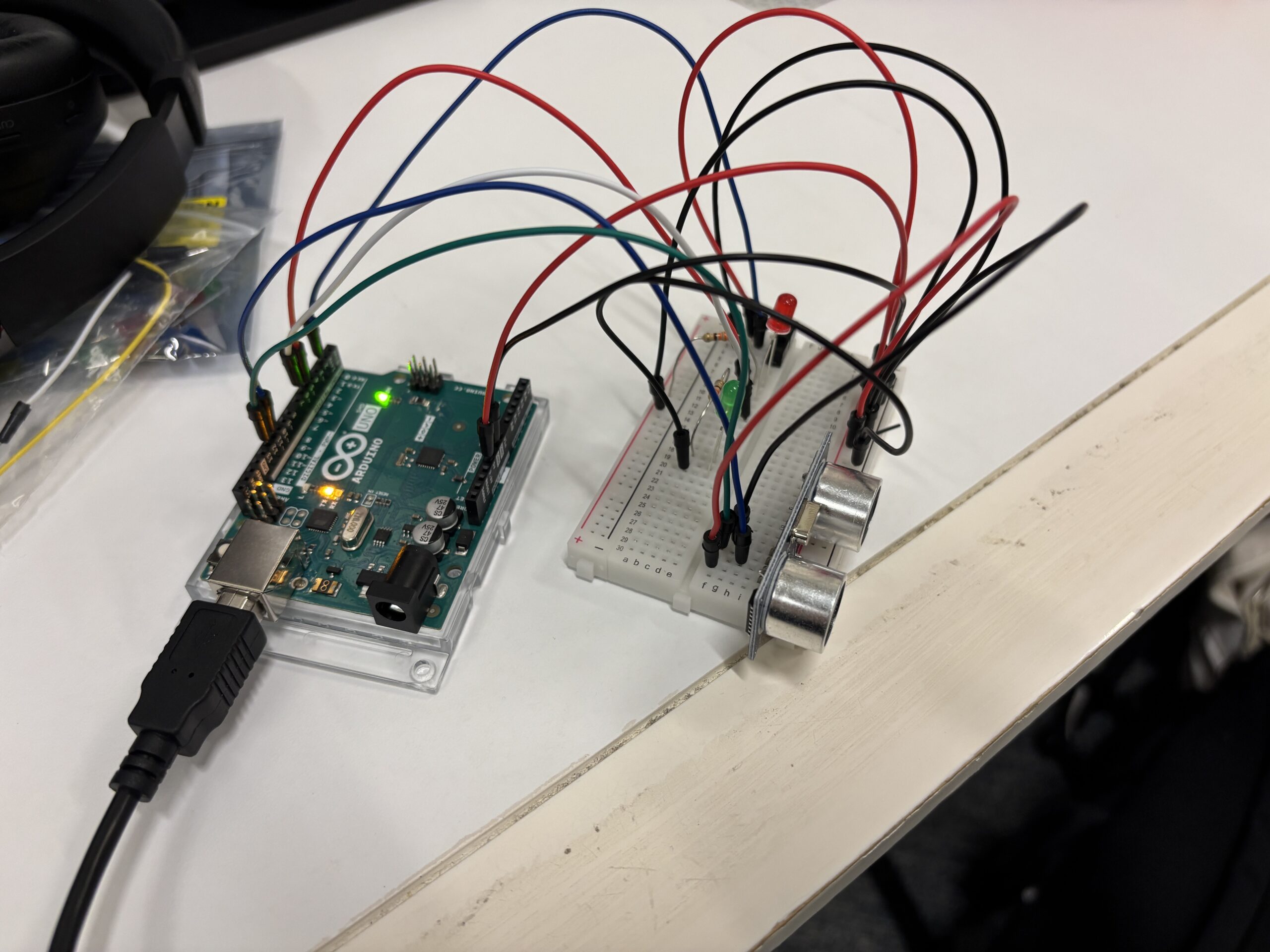
I wanted to combine things we learned in class with a new sensor. This time, it was an ultrasonic distance sensor and an LED. I think I just wanted to experiment with the brightness of the LED, to see how dim or how bright it would be depending on the distance information from the ultrasonic sensor. I watched a couple of YouTube videos to learn how to use and code for the HC-SR04, and it took me some time. Then I utilized code for sending a signal through the TRIG pin and receiving it back through the ECHO pin, calculating the microseconds, and converting it to centimeters using a specific function.
Demo
 Video
Video
Highlight of the code
int ECHO_PIN = 12; //input, collects data from waves
int TRIG_PIN = 11; //output, sends out the waves
int SWITCH_PIN = 2;
int SWITCH_STATE;
int RED_LED = 5; // red to light up when objects close
int GREEN_LED = 6; // yellow to fade if object getting further
float distance = -1.0; // variable to store distance
void setup() {
Serial.begin (9600); // set up a serial connection with the computer
pinMode(ECHO_PIN, INPUT); // echo pin measure the duration of pulses coming back from the distance sensor
pinMode(TRIG_PIN, OUTPUT); // trigger pin output pulses of electricity
pinMode(RED_LED, OUTPUT);
pinMode(GREEN_LED, OUTPUT);
pinMode(SWITCH_PIN, INPUT);
digitalWrite(TRIG_PIN, LOW);
}
void loop() {
long duration = getEchoDuration();
if (duration == 0){
distance = -1.0;
}
else{
distance = microsecondsToCentimeters(duration);
}
int SWITCH_STATE = digitalRead(SWITCH_PIN);
if (SWITCH_STATE == HIGH){
digitalWrite(RED_LED, HIGH);
}
else{
digitalWrite(RED_LED, LOW);
}
// if conditional to control LED's depending on distance.
int brightness = 0;
if (5 <= distance && distance <= 30) {
brightness = map(int(distance), 5, 30, 255, 0);
brightness = constrain(brightness, 0, 255);
} else if (distance > 0 && distance < 5) {
brightness = 255;
} else {
brightness = 0;
}
analogWrite(GREEN_LED, brightness);
Serial.println("Distance: ");
if (distance < 0){
Serial.println("Out of range");
}
else {
Serial.print(distance);
Serial.print("cm");
}
Serial.println("");
Serial.println("Brightness: ");
Serial.println(brightness);
delay(500);
}
long getEchoDuration() {
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
long duration = pulseIn(ECHO_PIN, HIGH, 30000);
return duration;
}
float microsecondsToCentimeters(long microseconds) {
return microseconds / 58.0;
}
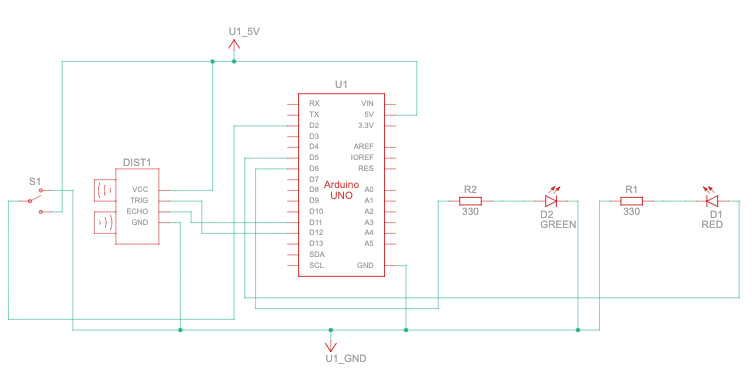
I think the if statement that detects if the distance is between 5 and 30 centimeters, and the else if statements, were quite important after I sent the signal through TRIG, received it through ECHO, and transformed the data into centimeters. So, basically, if the distance is more than 30cm, it will show “out of range” on the serial monitor and the green LED will be off. And if it is between 0cm and 5cm, then the brightness is at its peak, 255, and the green LED is fully bright. Also, the red LED works independently based on the sliding switch that we learned during class.
Sketch
 Reflection
Reflection
It took a long time to learn how the distance sensor works. From what I understood, it is similar to a Ping sensor which has 3 pins, but then I had to modify the code I got from the built-in example for TRIG and ECHO pins separately. For future improvements, I want to incorporate the red LED somehow inside the circuit, like if it is out of range or too close, I want the red light to light up. I know it is just a one-line fix, but then I also want it to work independently as well. Maybe when it is turned on, it will do what I said, but when it is off, then it is not going to do those things.