Physical Computing’s Greatest hits and misses:
The author mentions recurring themes of projects that are showcased every-year. While reading, I wondered what physical computing really is to begin with in the first place. After going through the reading and googling it up, it turns out to be the combination of hardware and software. A mix of the tangible and the non-tangible computational elements. The main agenda or concept the author was trying to get across the board was to never give-up despite the commonality of the theme of ideas that students usually come up with. Within the same domain, a newer idea can come up. This is something I actually agree with. Many times, we simply put the idea to bed because someone has done it before, but in-reality, there are so many things that can be built upon that existing idea. No-one is asking you to re-invent the wheel, but instead you can always improve and build upon existing themes and ideas. One of the main scientific principles in terms of ethos is to share your discoveries with the community, so that they can build upon it. This is where the idea of ‘remix’ comes in. As Steve Jobs once quoted Picasso on borrowing inspiration from your surrounding, I completely agree. The originality in my opinion is not limited to a newer concept, but also includes improvements and fixes which weren’t there before.
Making Interactive Art -Set the Stage, Then Shut Up and Listen:
I personally found this reading very helpful. For someone overly ambitious and over-joyed just by the sights of circuits and wires, I most of the times end up in a rabbit hole where after having worked for a while on a project, I tend to self-contradict and start all over again. This nature of working and making progress actually derails and delays the final project. So many doubts and attempts to make it crystal clear, I struggle to meet the deadlines. When I do manage to do so, I happen to be so fixated, that a single word of critique is like rubbing salt over my wounds. In the reading the author talks how project development is a two way street. A collaboration between the builder and the audience. As the title explicitly says, build and set the environment, and do not dictate the terms or procedure over the audience. Let them figure it out. Their response will vary over time, and this response will be , as described in the reading in a metaphorical way, shall be the critique to your performance. This critique will vary person to person, but it is important to ‘listen’ to what people have to say. The feedback shall hint towards potential areas to work upon. To say it in a much better way – the feedback shall hint towards the areas to ‘improve upon’. Extraneous elements can be removed for instance and the feedback loop shall help determine the degree of interactivity your work presents. A project, especially of artistic nature is never finished and that is what I agree with. It is always a work in progress and can further expand into a much more interactive experience.
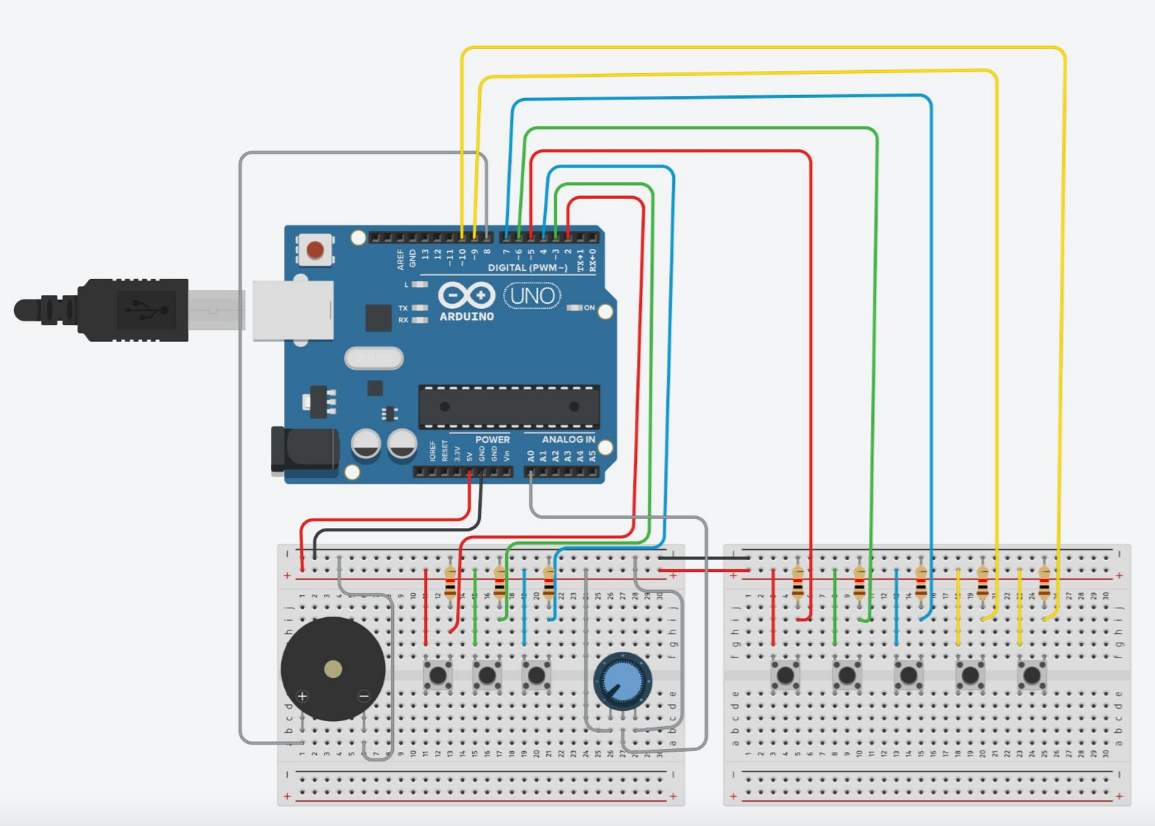
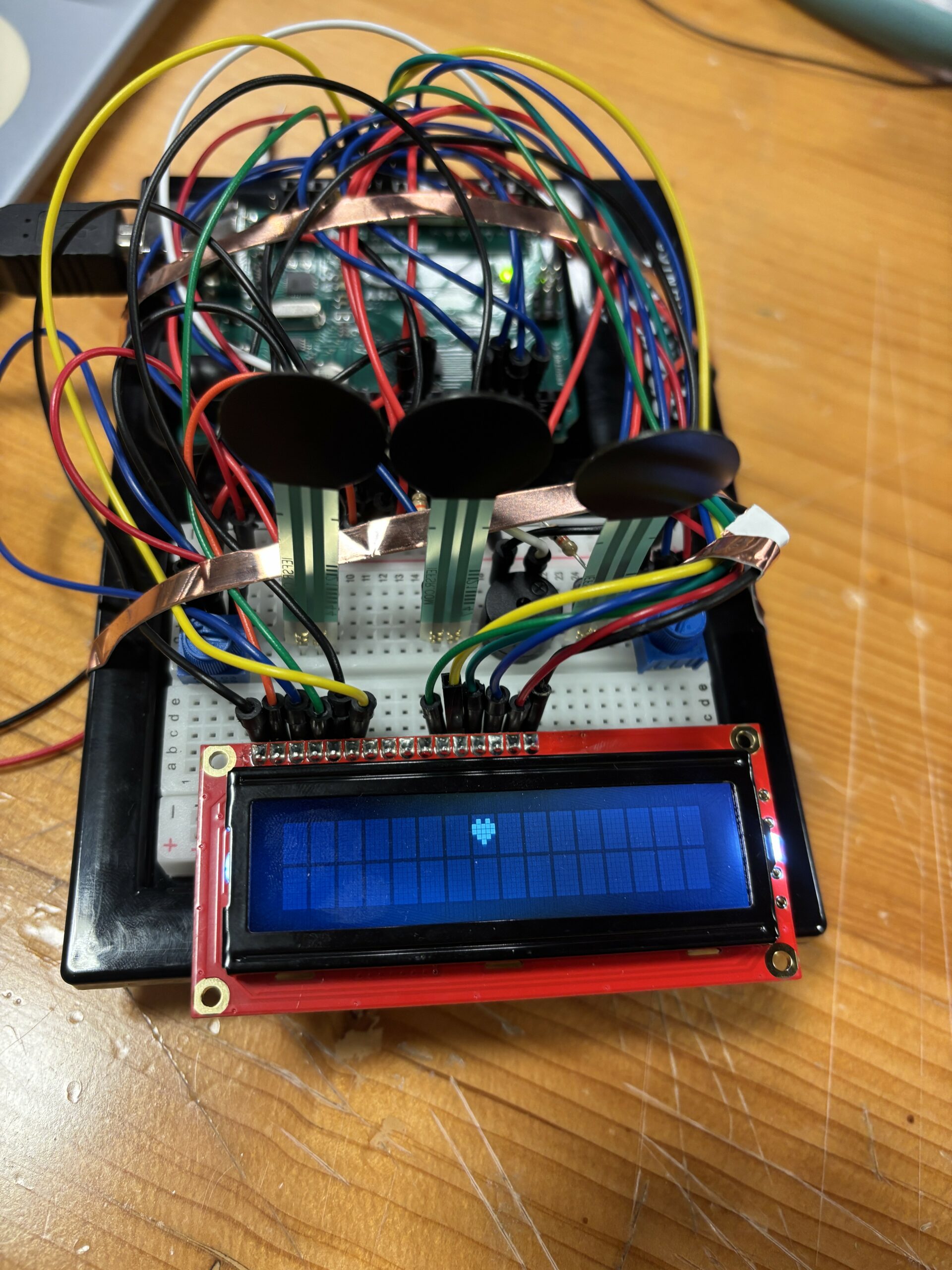
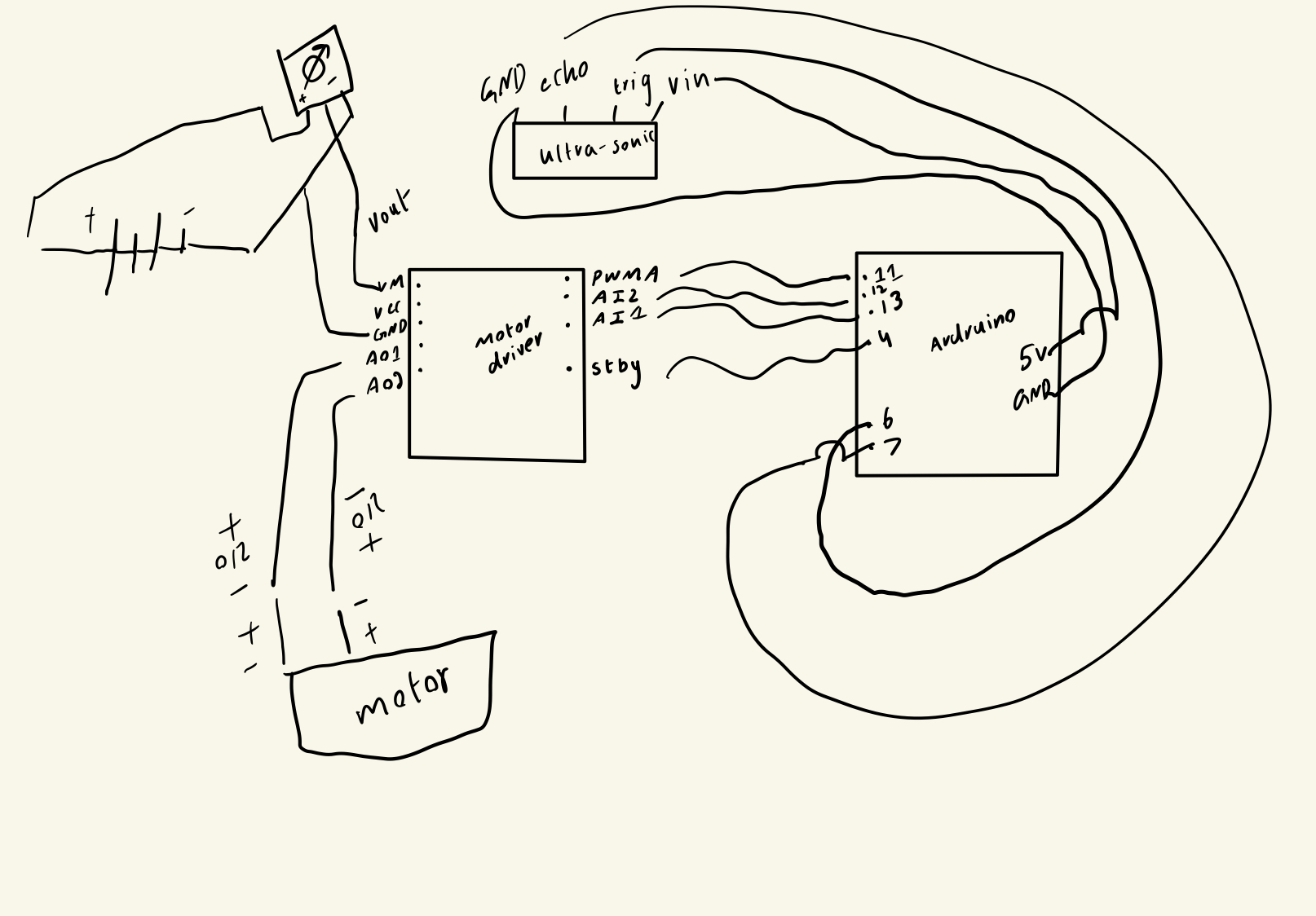 The schematic shows the connection between the components
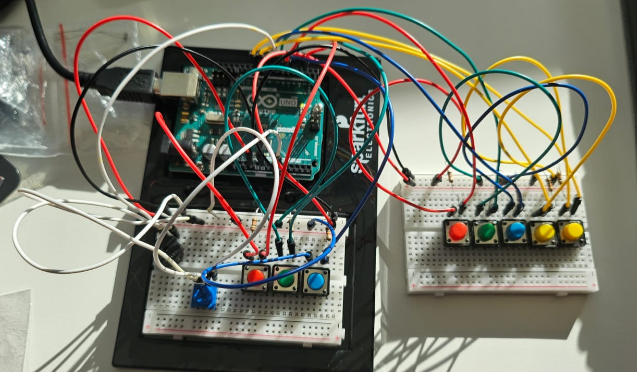
The schematic shows the connection between the components The overview of the circuit.
The overview of the circuit. The H-bridge motor-driver and both leds.
The H-bridge motor-driver and both leds. The potentiometer used.
The potentiometer used. The 9V battery in use with battery cap.
The 9V battery in use with battery cap. Ultra-sonic sensor.
Ultra-sonic sensor.