let xVal = 0; //initializing the X value for the position
function setup() {
createCanvas(640, 480);
}
function draw() {
background(230);
if (!serialActive) {
text("Press Space Bar to select Serial Port", 20, 30);
} else {
// draw an ellipse
ellipse(xVal, height/2, 100, 50); //giving the ellipse the value of the x position initialized above
}
}
function keyPressed() {
if (key == " ") {
// important to have in order to start the serial connection!!
setUpSerial();
}
}
function readSerial(data) {
if (data != null) {
xVal = map(data, 0, 500, 0, width); //mapping the values received from the photosensor to control the X position of the ellipse
console.log(data);
}
}
const int pSensor = A0;
void setup() {
pinMode(pSensor, INPUT);
Serial.begin(9600);
}
void loop() {
int val = analogRead(pSensor); //initializing the value received from the sensor
Serial.println(val); //sending the value of the sensor to p5js
}
Video:
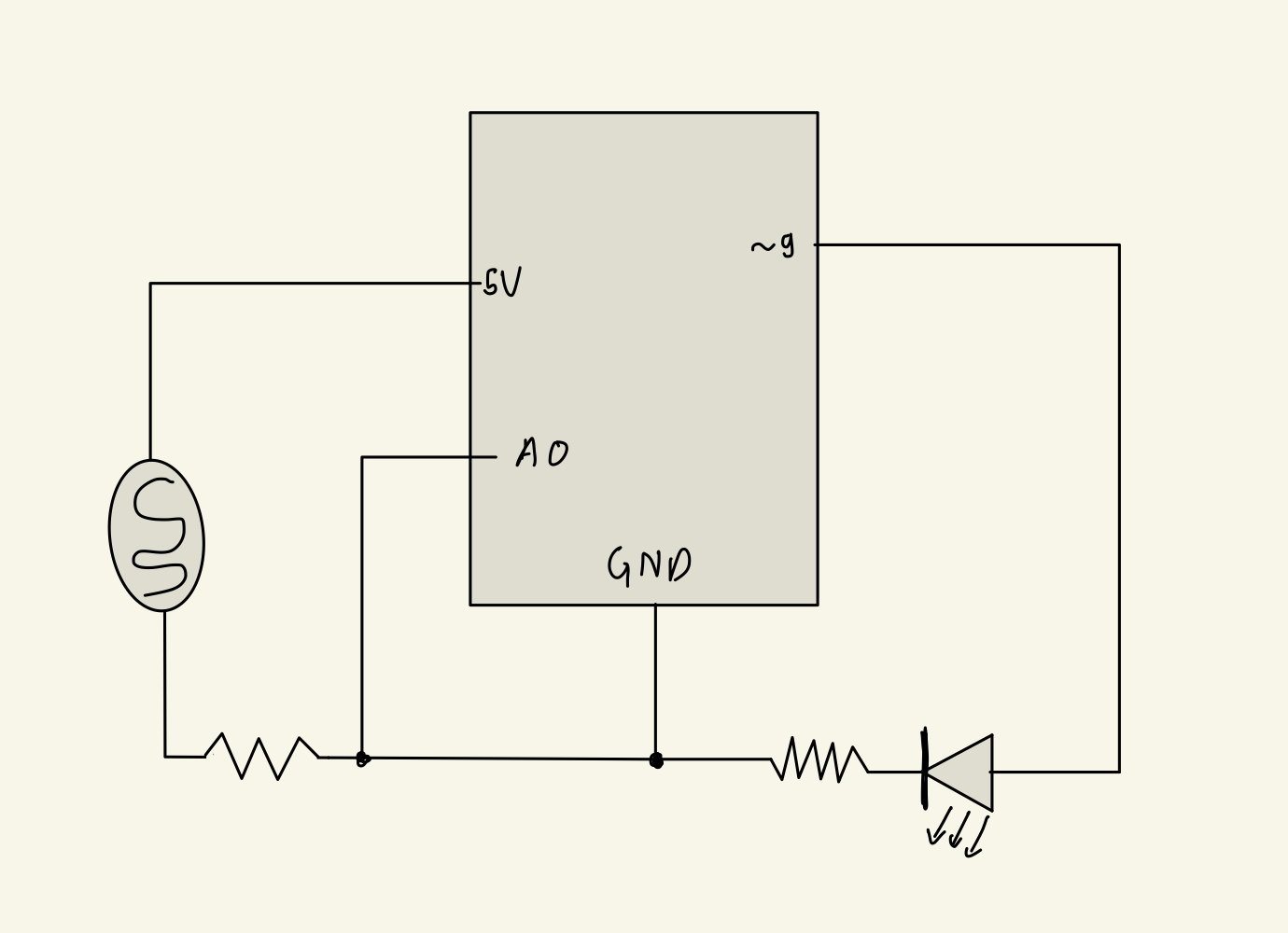
Exercise 2
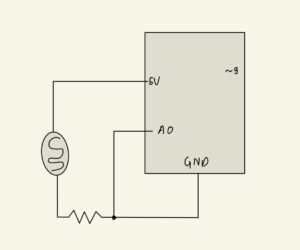
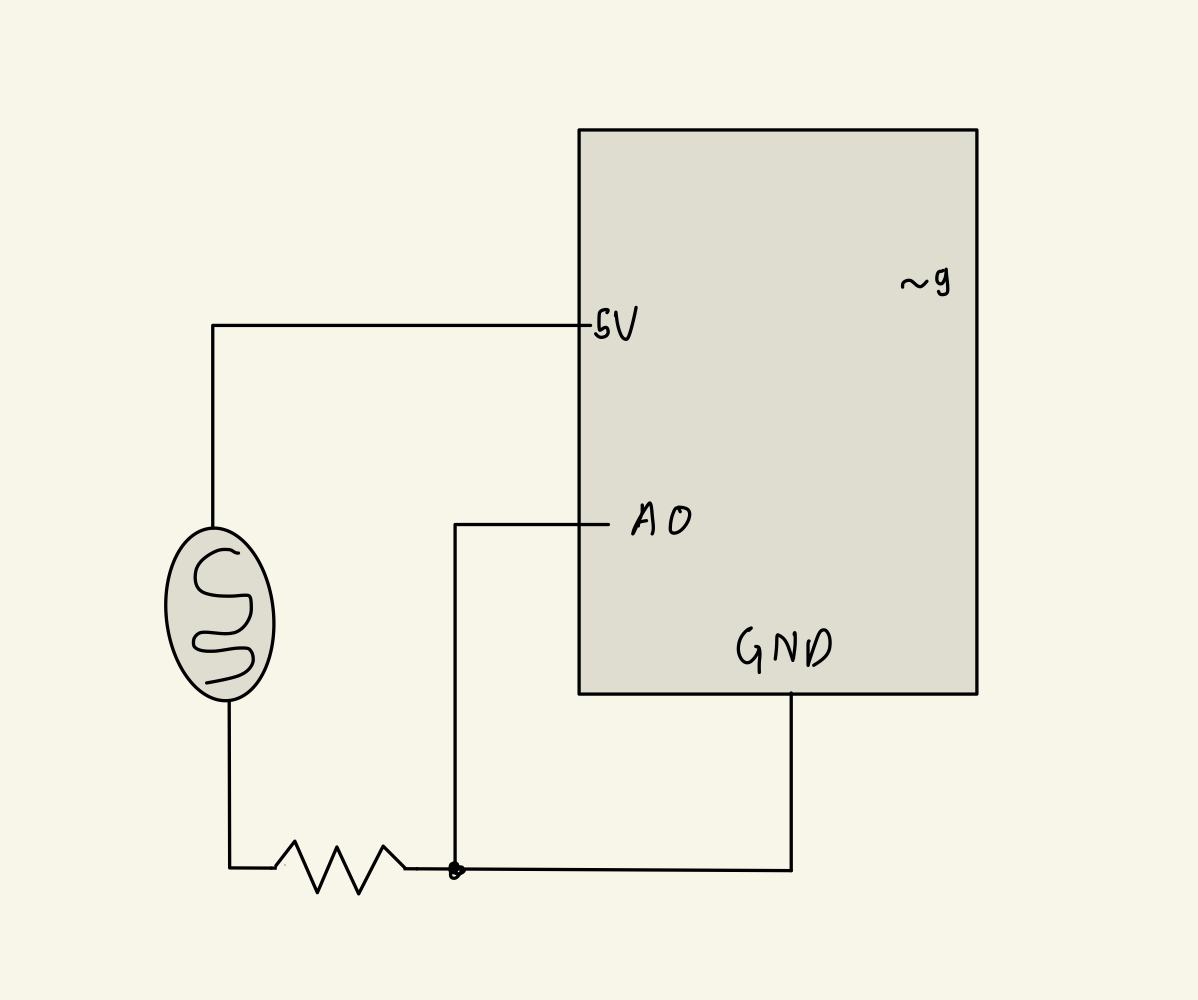
Scheme:
Code:
//p5js code
let change = 0; //initializing the variable for the distance between two consecutive center points of the rectangle
let previousX; //initializing the variable for the X dimension of the previous position of the rectangle
let previousY; //initializing the variable for the Y dimension of the previous position of the rectangle
function setup() {
createCanvas(640, 480);
textSize(18);
textAlign(CENTER);
previousX = 0;
previousY = 0;
}
function draw() {
background('red');
if (!serialActive) {
fill('white');
text("Press Space Bar to select Serial Port", width/2, height/2);
} else {
fill('white');
rectMode(CENTER);
rect(mouseX, mouseY, 200,200); //controlling the center of the rectangle with the mouse
fill('black');
text("Move as fast as you can to control the brightness of the LED", width/2,20);
getChange(); //calling the function that will track the distance between the two consecutive positions of the rectangle
}
}
//calculating the distance of two consecutive rectangle positions
function getChange(){
change = floor(sqrt(pow((mouseX - previousX),2) + pow((mouseY - previousY),2)));
previousX = mouseX;
previousY = mouseY;
}
function keyPressed() {
if (key == " ") {
setUpSerial();
}
}
function readSerial(data) {
if (data != null) {
console.log(change);
writeSerial(change); //sending the value of the distance two control the LED brightness
}
}
const int led = 9;
void setup() {
// put your setup code here, to run once:
pinMode(led, OUTPUT);
Serial.begin(9600);
while (Serial.available() <= 0) {
Serial.println("0");
delay(300);
}
}
void loop() {
while (Serial.available()) {
int brightness = Serial.parseInt(); // read the incoming data as an integer
analogWrite(led, brightness); // set the LED brightness based on incoming data
Serial.println();
}
}
Video:
Exercise 3
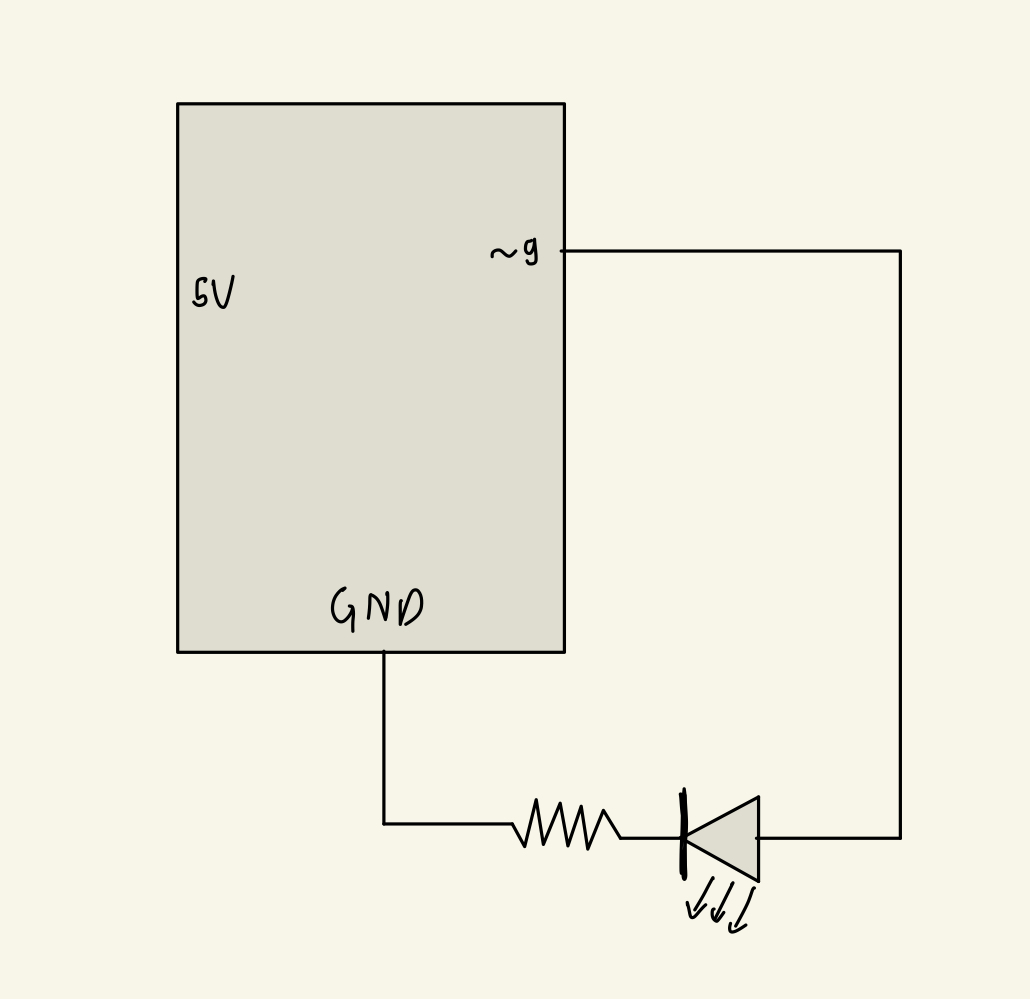
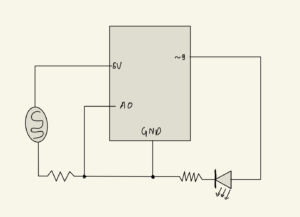
Scheme:
Code:
//p5js code
let velocity;
let gravity;
let position;
let acceleration;
let wind;
let drag = 0.99;
let mass = 50;
let ard_wind = 1; //initializing the wind speed
let bit;
function setup() {
createCanvas(640, 360);
position = createVector(width / 2, 0);
velocity = createVector(0, 0);
acceleration = createVector(0, 0);
gravity = createVector(0, 0.5 * mass);
wind = createVector(0, 0);
bit = 0; //initializing the value for the LED
}
function draw() {
background(255);
if (!serialActive) {
text("Press Space Bar to select Serial Port", 20, 30);
} else {
applyForce(wind);
applyForce(gravity);
velocity.add(acceleration);
velocity.mult(drag);
position.add(velocity);
acceleration.mult(0);
ellipse(position.x, position.y, mass, mass);
if (position.y > height - mass / 2) {
velocity.y *= -0.9; // A little dampening when hitting the bottom
position.y = height - mass / 2;
bit = 1; //lighting up the LED upon collision with "the ground"
} else {
bit = 0; //turning off the LED when the ball is not touching "ground"
}
}
}
function applyForce(force) {
// Newton's 2nd law: F = M * A
// or A = F / M
let f = p5.Vector.div(force, mass);
acceleration.add(f);
}
function keyPressed() {
if (keyCode == LEFT_ARROW) {
wind.x = ard_wind * -1; //when left arrow is pressed, the velocity of the wind attains a negative value and the ball moves to the left
}
if (keyCode == RIGHT_ARROW) {
wind.x = ard_wind; //when the right arrow is pressed, the velocity of the wind attains a positive value and the ball moves to the right
}
if (keyCode == DOWN_ARROW) {
mass = random(15, 80);
position.y = -mass;
velocity.mult(0);
}
if (key == " ") {
// important to have in order to start the serial connection!!
setUpSerial();
}
}
function readSerial(data) {
if (data != null) {
let sen = bit + "\n";
writeSerial(sen); //sending the values to light up or turn off the LED
ard_wind = map(data, 0, 300, 0, 10); // mapping the data received from arduino to a sensible range for the wind velocity
console.log(ard_wind);
}
}
const int led = 12;
const int photoSensor = A0;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
pinMode(led, OUTPUT);
pinMode(photoSensor, INPUT);
while (Serial.available() <= 0) {
Serial.println(0);
// delay(300);
}
}
void loop() {
while (Serial.available() > 0) {
int bit = Serial.parseInt(); // read the incoming data as an integer
digitalWrite(led, bit); // set the LED brightness based on incoming data
//send the values of the photosensor to p5js
int val = analogRead(photoSensor);
Serial.println(val);
}
}