Description
For this assignment, I created a “Simon Says” style memory game. The goal of the game is to memorize a sequence of colors displayed on the main RGB LED and repeat the pattern back using four push buttons.
To fulfill the assignment requirements, I incorporated both digital and analog controls to affect the game’s behavior:
-
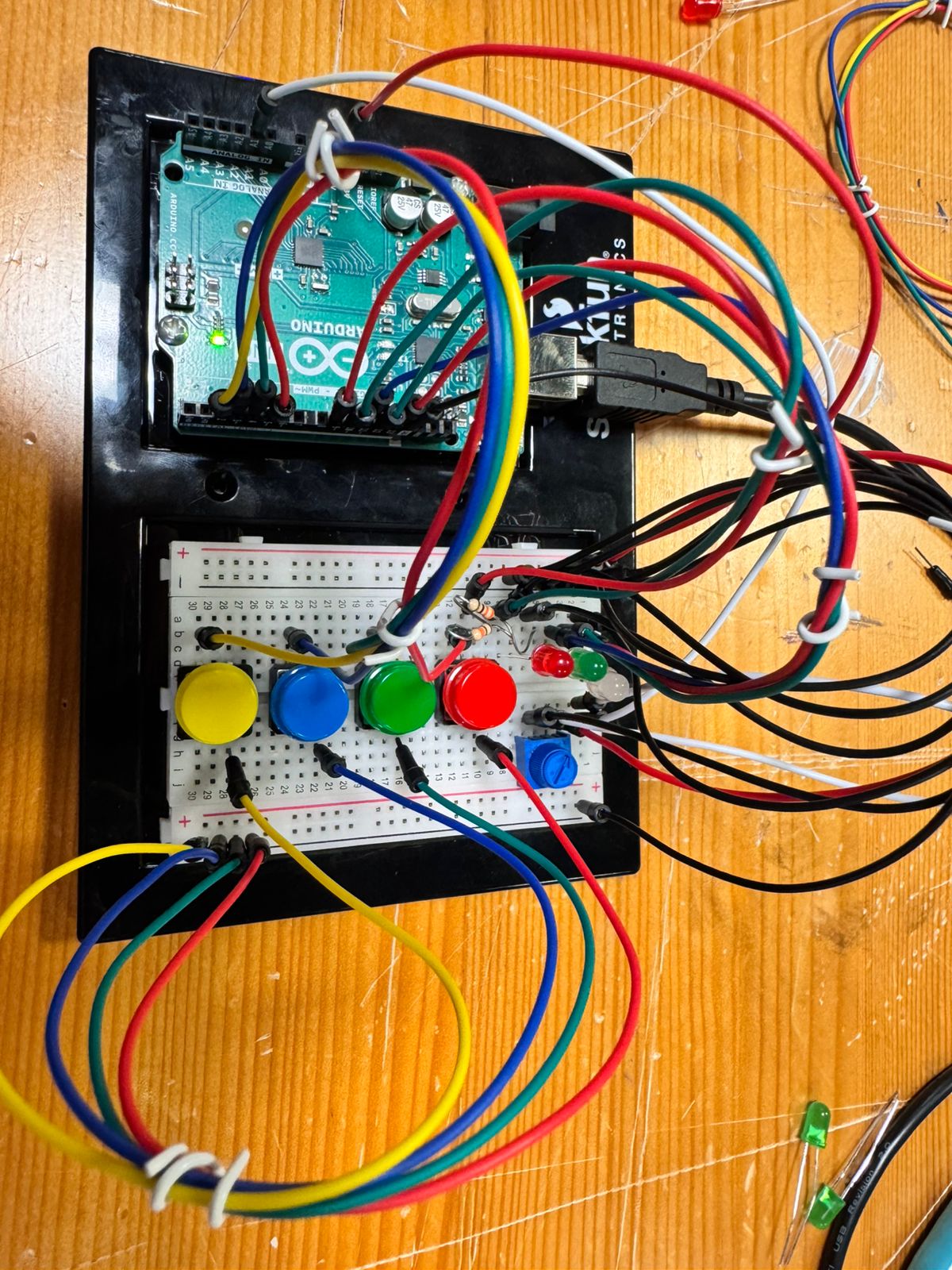
Digital Inputs (Switches): Four push buttons act as the game controller. These are used to start the game and input the color sequence.
-
Analog Input (Sensor): A Potentiometer is used as a difficulty selector. Before the game starts, reading the analog value of the potentiometer determines the speed of the flashes and the length of the sequence.
-
Outputs:
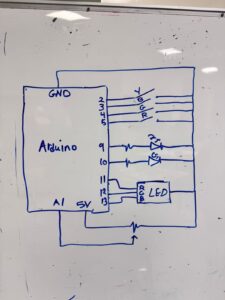
Schematic
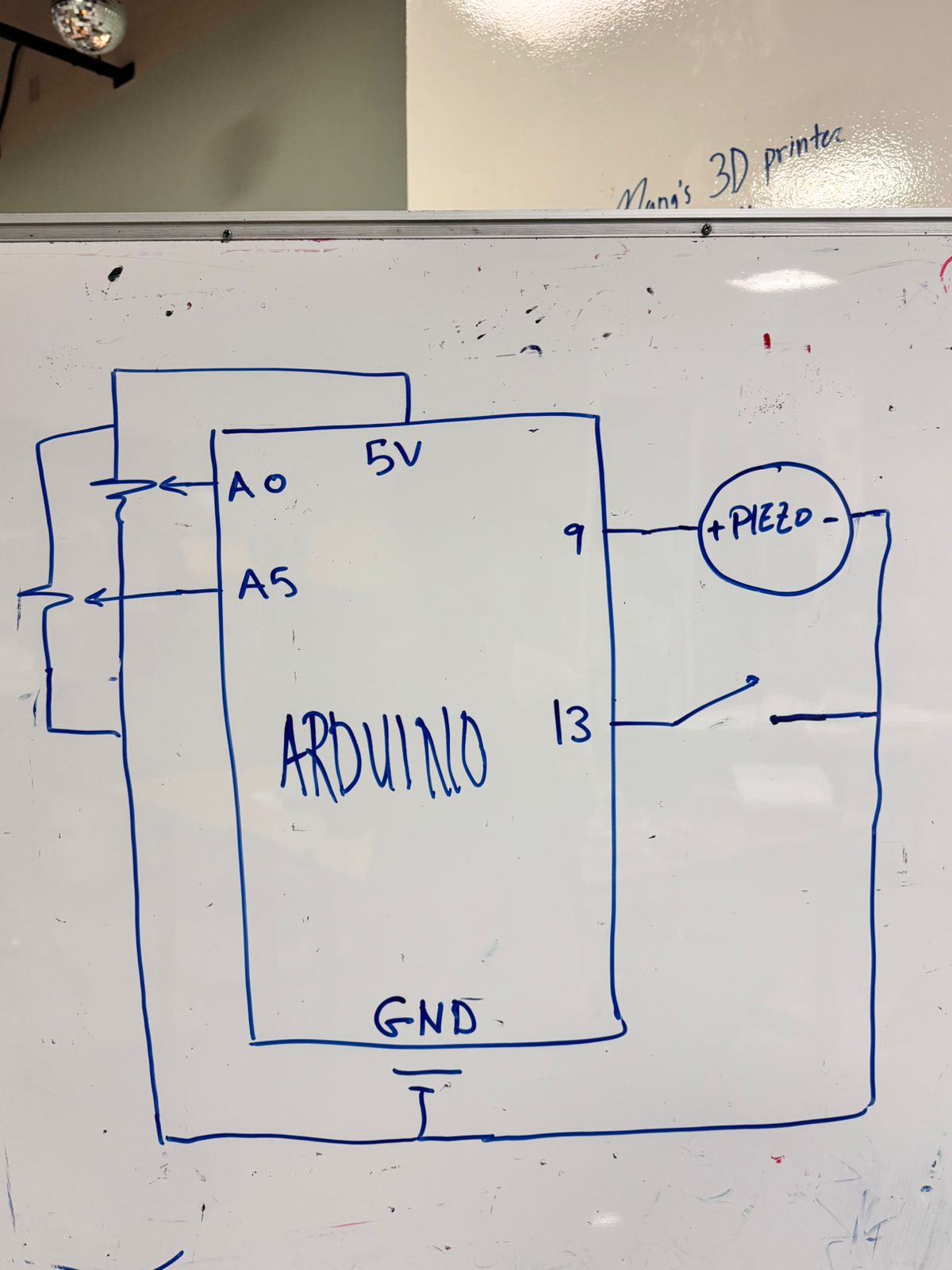
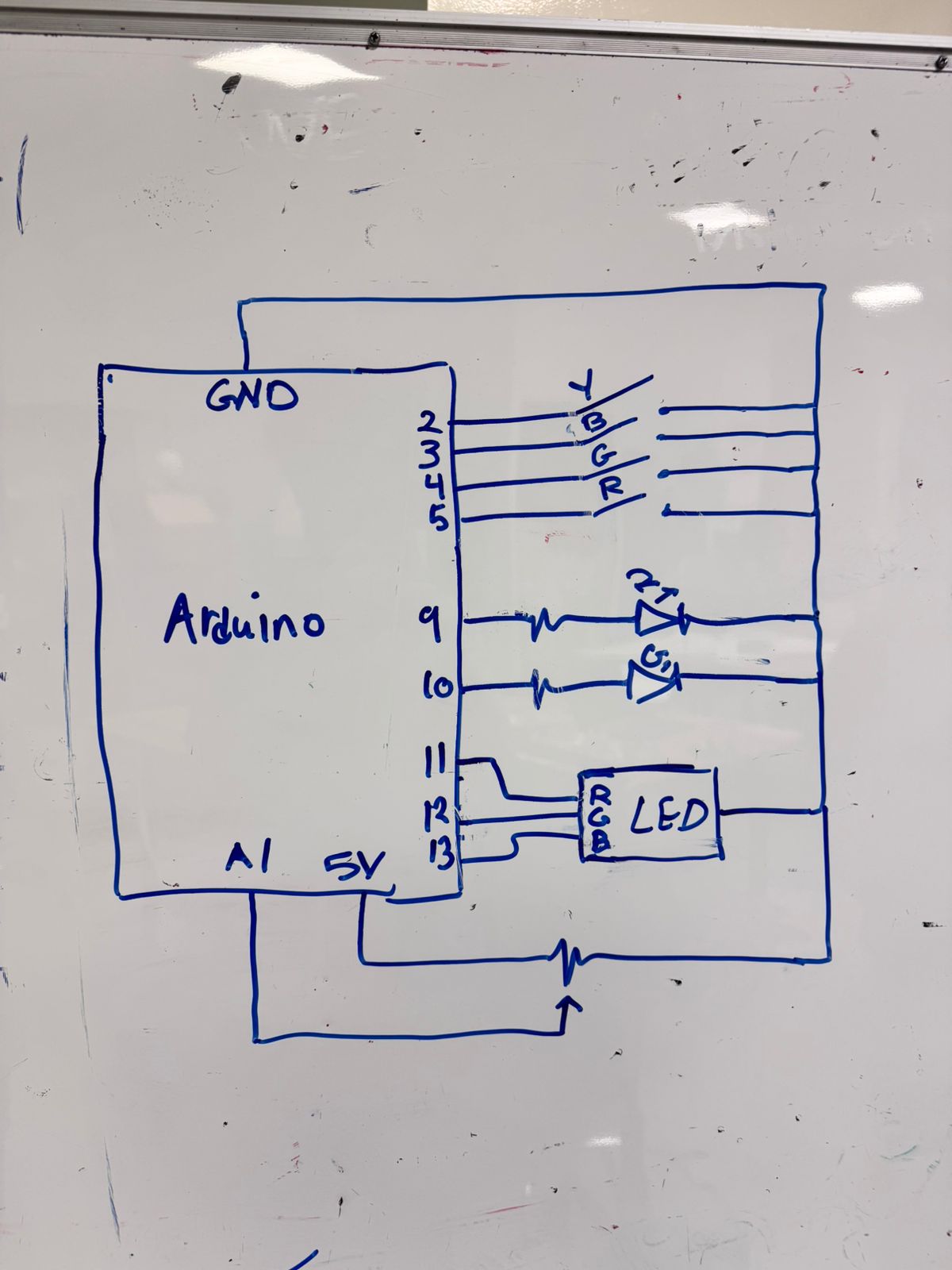
Here is the hand-drawn wiring diagram for the circuit. It details the connections for the RGB LED (Pins 11-13), the Feedback LEDs (Pins 9-10), the Buttons (Pins 2-5), and the Potentiometer (Pin A1).
Logic & Interaction
The system waits for the Yellow button to be pressed to start. Once triggered, the Arduino reads the Potentiometer.
-
If the potentiometer is turned one way, the game is “Easy” (slower flashes, shorter sequence).
-
If turned the other way, the game becomes “Hard” (rapid flashes, longer sequence).
The Arduino then generates a random pattern displayed on the RGB LED. The player must press the buttons in the correct order. If successful, the distinct Green feedback LED flashes; if incorrect, the Red feedback LED flashes.
Gameplay Video
Code
Below is the Arduino code used for this project.
// RGB LED Pins
const int RGB_RED_PIN = 13;
const int RGB_GREEN_PIN = 12;
const int RGB_BLUE_PIN = 11;
// Feedback LED Pins
const int FEEDBACK_RED_PIN = 9;
const int FEEDBACK_GREEN_PIN = 10;
// Button Pins
const int BUTTON_YELLOW_PIN = 2;
const int BUTTON_BLUE_PIN = 3;
const int BUTTON_GREEN_PIN = 4;
const int BUTTON_RED_PIN = 5;
// Potentiometer Pin
const int POT_PIN = A1;
// Game Settings
const int BASE_SEQUENCE_LENGTH = 3;
const int MAX_SEQUENCE_LENGTH = 12;
const int BASE_LIGHT_DISPLAY_TIME = 1000;
const int FAST_LIGHT_DISPLAY_TIME = 100;
const int PAUSE_BETWEEN_LIGHTS = 50;
const int FEEDBACK_BLINK_TIME = 200;
const int FEEDBACK_BLINK_COUNT = 3;
// Game State
int gameSequence[MAX_SEQUENCE_LENGTH];
int currentSequenceLength = BASE_SEQUENCE_LENGTH;
int currentDisplayTime = BASE_LIGHT_DISPLAY_TIME;
void setup() {
// Initialize serial communication
Serial.begin(9600);
Serial.println("Simon Game Started!");
// Configure LED pins
pinMode(RGB_RED_PIN, OUTPUT);
pinMode(RGB_GREEN_PIN, OUTPUT);
pinMode(RGB_BLUE_PIN, OUTPUT);
pinMode(FEEDBACK_RED_PIN, OUTPUT);
pinMode(FEEDBACK_GREEN_PIN, OUTPUT);
// Configure button pins
pinMode(BUTTON_YELLOW_PIN, INPUT_PULLUP);
pinMode(BUTTON_BLUE_PIN, INPUT_PULLUP);
pinMode(BUTTON_GREEN_PIN, INPUT_PULLUP);
pinMode(BUTTON_RED_PIN, INPUT_PULLUP);
// Reset LEDs
turnAllRGBOff();
digitalWrite(FEEDBACK_RED_PIN, LOW);
digitalWrite(FEEDBACK_GREEN_PIN, LOW);
// Seed random generator
randomSeed(analogRead(A0));
Serial.println("Waiting for start...");
}
void loop() {
// Wait for start button
while (digitalRead(BUTTON_YELLOW_PIN) == HIGH) {
digitalWrite(FEEDBACK_RED_PIN, HIGH);
digitalWrite(FEEDBACK_GREEN_PIN, LOW);
delay(150);
digitalWrite(FEEDBACK_RED_PIN, LOW);
digitalWrite(FEEDBACK_GREEN_PIN, HIGH);
delay(150);
digitalWrite(FEEDBACK_GREEN_PIN, LOW);
delay(100);
}
digitalWrite(FEEDBACK_RED_PIN, LOW);
digitalWrite(FEEDBACK_GREEN_PIN, LOW);
Serial.println("Game Starting...");
delay(200);
// Update difficulty based on potentiometer
updateGamePace();
// Generate and display sequence
generateSequence();
printSequence();
displaySequence();
// Process player input
bool correct = getUserInput();
// Provide result feedback
if (correct) {
Serial.println("Correct!");
feedbackBlink(FEEDBACK_GREEN_PIN, FEEDBACK_BLINK_COUNT, FEEDBACK_BLINK_TIME);
} else {
Serial.println("Incorrect!");
feedbackBlink(FEEDBACK_RED_PIN, FEEDBACK_BLINK_COUNT, FEEDBACK_BLINK_TIME);
}
}
// Adjust sequence length and speed based on potentiometer value
void updateGamePace() {
int potValue = analogRead(POT_PIN);
currentSequenceLength = map(potValue, 0, 1023, BASE_SEQUENCE_LENGTH, MAX_SEQUENCE_LENGTH);
currentSequenceLength = constrain(currentSequenceLength, BASE_SEQUENCE_LENGTH, MAX_SEQUENCE_LENGTH);
currentDisplayTime = map(potValue, 0, 1023, BASE_LIGHT_DISPLAY_TIME, FAST_LIGHT_DISPLAY_TIME);
currentDisplayTime = constrain(currentDisplayTime, FAST_LIGHT_DISPLAY_TIME, BASE_LIGHT_DISPLAY_TIME);
}
// Fill sequence array with random colors
void generateSequence() {
for (int i = 0; i < currentSequenceLength; i++) {
gameSequence[i] = random(4);
}
}
// Output current sequence to serial monitor for debugging
void printSequence() {
Serial.print("Sequence: [");
for (int i = 0; i < currentSequenceLength; i++) {
Serial.print(gameSequence[i]);
if (i < currentSequenceLength - 1) Serial.print(", ");
}
Serial.println("]");
}
// Play back the sequence on the RGB LED
void displaySequence() {
for (int i = 0; i < currentSequenceLength; i++) {
switch (gameSequence[i]) {
case 0: turnOnRGBRed(); break;
case 1: turnOnRGBGreen(); break;
case 2: turnOnRGBBlue(); break;
case 3: turnOnRGBYellow(); break;
}
delay(currentDisplayTime);
turnAllRGBOff();
delay(PAUSE_BETWEEN_LIGHTS);
}
}
// Capture player input and verify against sequence
bool getUserInput() {
int inputCount = 0;
while (inputCount < currentSequenceLength) {
int pressedButton = readButtons();
if (pressedButton != -1) {
// Visual feedback for button press
switch (pressedButton) {
case 0: turnOnRGBRed(); break;
case 1: turnOnRGBGreen(); break;
case 2: turnOnRGBBlue(); break;
case 3: turnOnRGBYellow(); break;
}
delay(100);
turnAllRGBOff();
delay(50);
// Check against expected sequence
if (pressedButton != gameSequence[inputCount]) {
return false;
}
inputCount++;
// Wait for button release
while(digitalRead(BUTTON_RED_PIN) == LOW || digitalRead(BUTTON_GREEN_PIN) == LOW ||
digitalRead(BUTTON_BLUE_PIN) == LOW || digitalRead(BUTTON_YELLOW_PIN) == LOW);
}
}
return true;
}
// Return index of pressed button or -1 if none
int readButtons() {
if (digitalRead(BUTTON_RED_PIN) == LOW) return 0;
if (digitalRead(BUTTON_GREEN_PIN) == LOW) return 1;
if (digitalRead(BUTTON_BLUE_PIN) == LOW) return 2;
if (digitalRead(BUTTON_YELLOW_PIN) == LOW) return 3;
return -1;
}
// Blink specified LED for feedback
void feedbackBlink(int pin, int count, int blinkTime) {
for (int i = 0; i < count; i++) {
digitalWrite(pin, HIGH);
delay(blinkTime);
digitalWrite(pin, LOW);
delay(blinkTime);
}
}
// --- RGB Control Helpers ---
void turnAllRGBOff() {
digitalWrite(RGB_RED_PIN, LOW);
digitalWrite(RGB_GREEN_PIN, LOW);
digitalWrite(RGB_BLUE_PIN, LOW);
}
void turnOnRGBRed() {
turnAllRGBOff();
digitalWrite(RGB_RED_PIN, HIGH);
}
void turnOnRGBGreen() {
turnAllRGBOff();
digitalWrite(RGB_GREEN_PIN, HIGH);
}
void turnOnRGBBlue() {
turnAllRGBOff();
digitalWrite(RGB_BLUE_PIN, HIGH);
}
void turnOnRGBYellow() {
turnAllRGBOff();
digitalWrite(RGB_RED_PIN, HIGH);
digitalWrite(RGB_GREEN_PIN, HIGH);
}