
IDEA
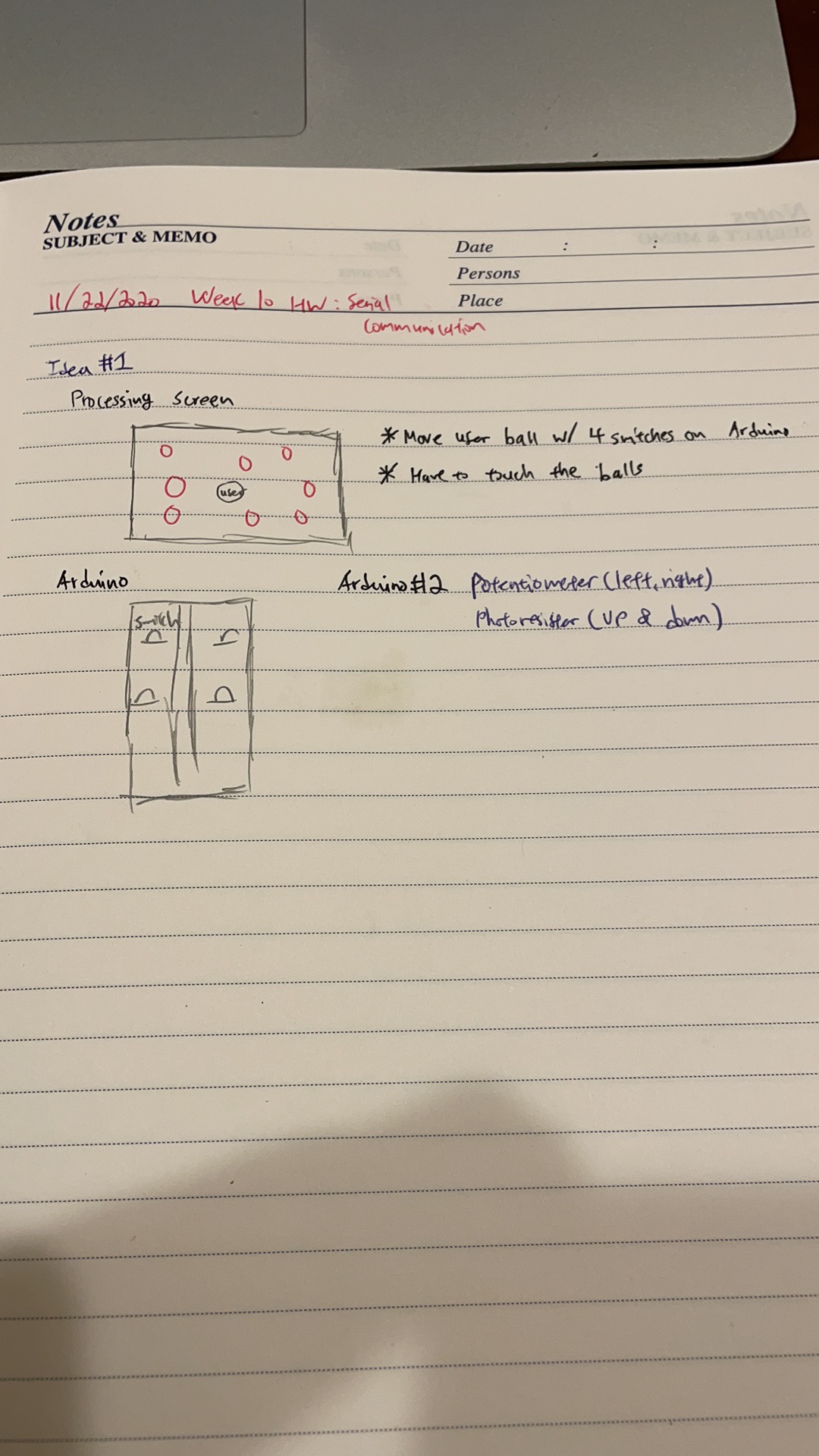
For this week’s assignment, I could not really think of another creative or original game so I just decided to create a simpler version of the game that I had created for my Midterm project but with a little twist. That twist is that instead of controlling the user ball with only arrow keys, I made it available to control the left & right movement of the ball with a potentiometer on the Arduino along with two buttons (Red and Green buttons) that controls the up and down movement of the user ball, Red being up and Green being down.
 Challenges/Difficulties
Challenges/Difficulties
There was not as much difficulties faced throughout the process of making it, but I would say that the most difficult part I encountered was understanding the relationship between Arduino and Processing as I was not able to fully grasp all of the information from our last lab session. However, after talking with Professor Aaron, I was able to get a clearer idea of serial communication.
Setup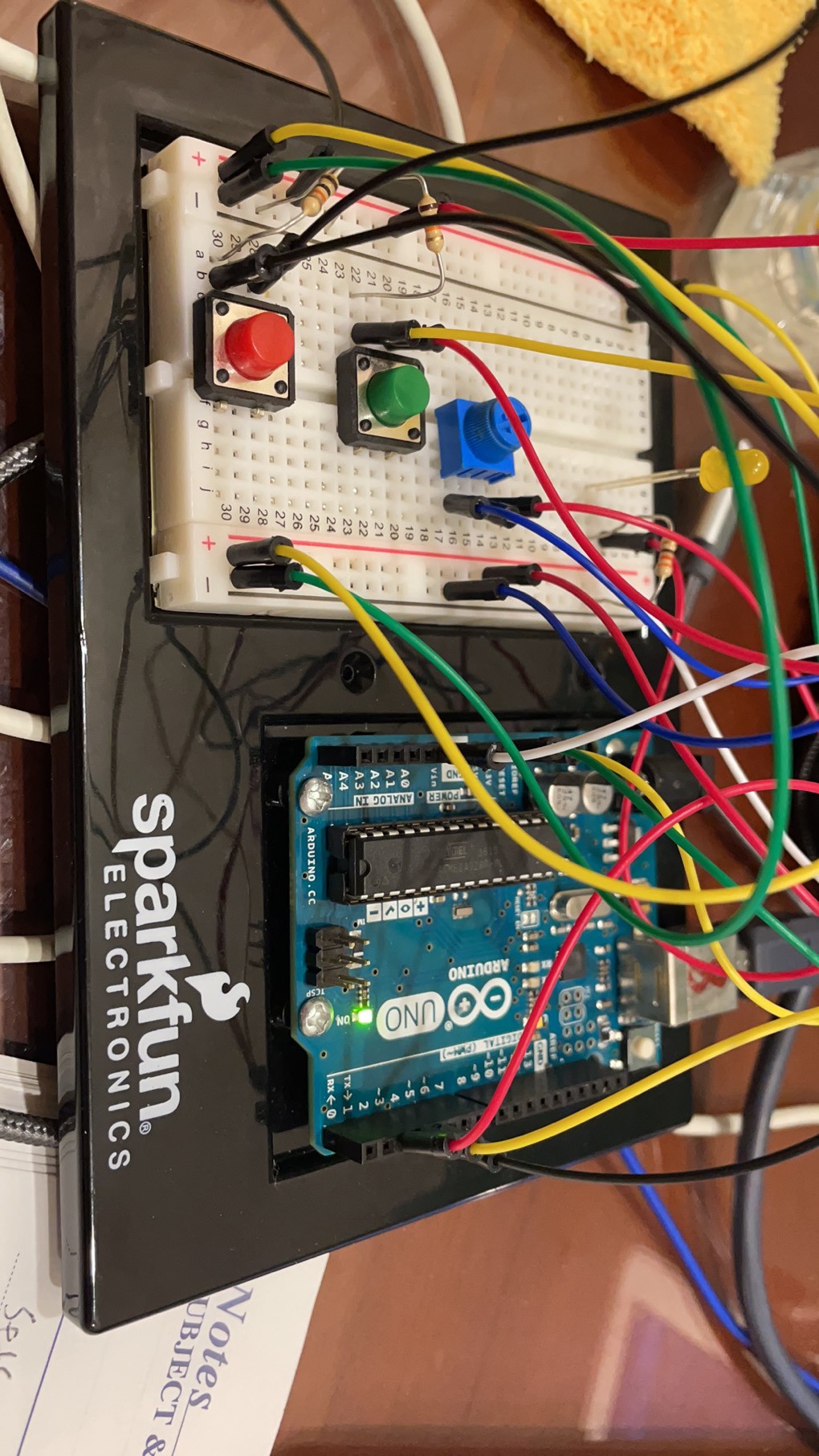
Final Demonstration
Arduino Code
const int greenSwitch = 3;
const int redSwitch = 4;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
Serial.println("0,0");
pinMode(greenSwitch, INPUT);
pinMode(redSwitch, INPUT);
}
void loop() {
if (Serial.available() > 0) {
char inByte = Serial.read();
int sensor = analogRead(A0);
delay(1);
int sensor2 = digitalRead(greenSwitch);
int sensor3 = digitalRead(redSwitch);
Serial.print(sensor);
Serial.print(',');
Serial.print(sensor2);
Serial.print(',');
Serial.println(sensor3);
}
}
Processing Code
import processing.serial.*;
Serial myPort;
int xPos=0;
Balls [] balls;
//Timer timer;
userBall myBall;
int numberofballs = 15;
int amountcollided;
void setup() {
size(1280, 960);
//printing out all the available ports
printArray(Serial.list());
//make the chosen port from the list as a string or a name
String portname=Serial.list()[4];
/*initializes the class "Serial"
the 9600 is the baud (kinda the rate that bytes are being uploaded or transferred
*/
myPort = new Serial(this, portname, 9600);
//timer = new Timer();
myBall = new userBall();
balls = new Balls [numberofballs];
for (int i=0; i<balls.length; i++) {
balls[i] = new Balls();
}
}
void draw() {
background(255);
//fill(0);
//ellipse(xPos, height/2, 50, 50);
for (int i=0; i<balls.length; i++) {
balls[i].drawBalls();
}
myBall.drawuserBall();
myBall.checkEdge();
collisionDetection();
//timer.showTimer();
}
void serialEvent(Serial myPort) {
//read string of information
String s=myPort.readStringUntil('\n');
s=trim(s);
//if there's sth in s
if (s!=null) {
//split the string s based on commmas and put it into integer array "values"
int values[]=int(split(s, ','));
/*as long as there's a total of three arrays of information from Arduino
*/
if (values.length==3) {
//potentiometer value
myBall.xPos=values[0];
//sthis is values for greenswitch
if (values[1] ==1) {
myBall.yPos +=3;
}
//this is values for redswitch
if (values[2] == 1) {
myBall.yPos -=3;
}
myBall.xPos = int (map(myBall.xPos, 0, 1023, 0, width));
}
}
//println(xPos);
myPort.write('0');
}
void collisionDetection() {
amountcollided = 0;
for (int i=0; i<balls.length; i++) {
//if the x and y location distance of any NPC ball and user ball added together is smaller than the radius of the NPC ball and user ball, then it means it has collided
if (dist(balls[i].locx, balls[i].locy, myBall.xPos, myBall.yPos)< balls[i].radius + myBall.radius) {
//println(dist(balls[i].locx, balls[i].locy, myBall.locx, myBall.locy));
//balls[i].iscollided=true; //if it collides, changes the boolean to true, changing the image
//if (balls[i].iscollided == true) {
// amountcollided +=1;
stroke(255);
fill(139,0,139);
ellipse(balls[i].locx, balls[i].locy, balls[i].ballwidth, balls[i].ballheight);
//}
}
}
}
class Balls {
float locx, locy;
float ballwidth, ballheight;
int radius=25;
boolean iscollided=false;
Balls() {
locx=random(width); //putting random will let the balls appear at different locations
locy=random(height);
ballwidth=2*radius;
ballheight=2*radius;
}
void drawBalls() {
stroke(166, 134, 230);
fill(255, 0, 0);
ellipse(locx, locy, ballwidth, ballheight);
}
void collided() {
if (iscollided == true) {
stroke(255);
fill(255);
ellipse(locx, locy, ballwidth, ballheight);
}
}
}
class Timer {
float locx, locy;
float timerwidth, timerheight;
int countdown=20;
int seconds;
float startTime;
Timer() {// ask about the logic behind this and how to create a countdown timer?
textSize(50);
startTime= millis()/1000 + countdown;
seconds = int(startTime- millis()/1000);
}
void showTimer() {
if (seconds<0) {
startTime= millis()/1000 + countdown;//resets the timer and restarts it when less than 0
//if seconds is zero, display "game over"
} else {
seconds = int(startTime- millis()/1000);
fill(255, 0, 0);
text(seconds, width/2-100, 100);
}
}
}
class userBall {
float xPos, yPos;
float ballwidth, ballheight;
//float xspeed=5;
//float yspeed=5;
float radius=30;
userBall() {//the constructor for this userBall object
//xPos=width/2;
xPos = 0;
yPos=0;
ballwidth=2*radius;
ballheight=2*radius;
}
void drawuserBall() {
fill(0);
stroke(0, 0, 255);
ellipse(xPos, yPos, ballwidth, ballheight);
}
void checkEdge() {
if (yPos < 0) {
yPos = height;
}
if (yPos >height){
yPos = 0;
}
}
}