Concept:
The idea for this project came from something I’ve always found fascinating: the transition from night to day, especially the way streetlights turn off as the new day begins and the sun begins to rise.
I’ve always been captivated by the natural beauty of a sunrise, how the sky gradually shifts colors as the day begins. The goal was to create something interactive where turning off a “streetlight” (represented by a blue LED) would trigger a sunrise sequence using an RGB LED. I used a photoresistor that detects the change in light when the streetlight is turned off, this then turns on the RGB light sequence.
Demonstration:
Code:
const int blue_led_pin = 9; // Blue light (streetlight)
const int switch_pin = 2; // Switch pin
const int photo_resistor_pin = A0; // Photoresistor pin
const int red_pin = 3; // Red pin of RGB
const int green_pin = 5; // Green pin of RGB
const int blue_pin = 6; // Blue pin of RGB
// Variables
bool streetlight_on = true; // bool to track if the stretlight is on
bool sunrise_started = false; // bool to track is the sunrise sequence has started
void setup() {
// Initialize pins
pinMode(blue_led_pin, OUTPUT);
pinMode(switch_pin, INPUT);
pinMode(red_pin, OUTPUT);
pinMode(green_pin, OUTPUT);
pinMode(blue_pin, OUTPUT);
// streetlight starts off as on
digitalWrite(blue_led_pin, HIGH);
}
void loop() {
// Check if the switch is pressed
if (digitalRead(switch_pin) == HIGH && streetlight_on) {
digitalWrite(blue_led_pin, LOW); // Turn off streetlight
streetlight_on = false; // change the bool to reflect the streetlight being off
}
// Read light level from photoresistor
int light_level = analogRead(photo_resistor_pin);
// If light level drops below threshold, start sunrise sequence, can be if the blue light turns off or if the light is manually blocked
if ( !sunrise_started && light_level < 500) {
sunrise_effect();
sunrise_started = true; // bool confirms that sunrise has started
}
}
void sunrise_effect() {
// Gradually change colors like a sunrise
for (int i = 0; i <= 255; i++) {
analogWrite(red_pin, i); // Increase red brightness first
delay(30); // Adjust delay for smooth transition
if (i > 100) {
analogWrite(green_pin, i - 100); // Add green for yellow/orange colors
}
if (i > 200) {
analogWrite(blue_pin, i - 200); // Add blue for full white at to show noon
}
delay(30);
}
}
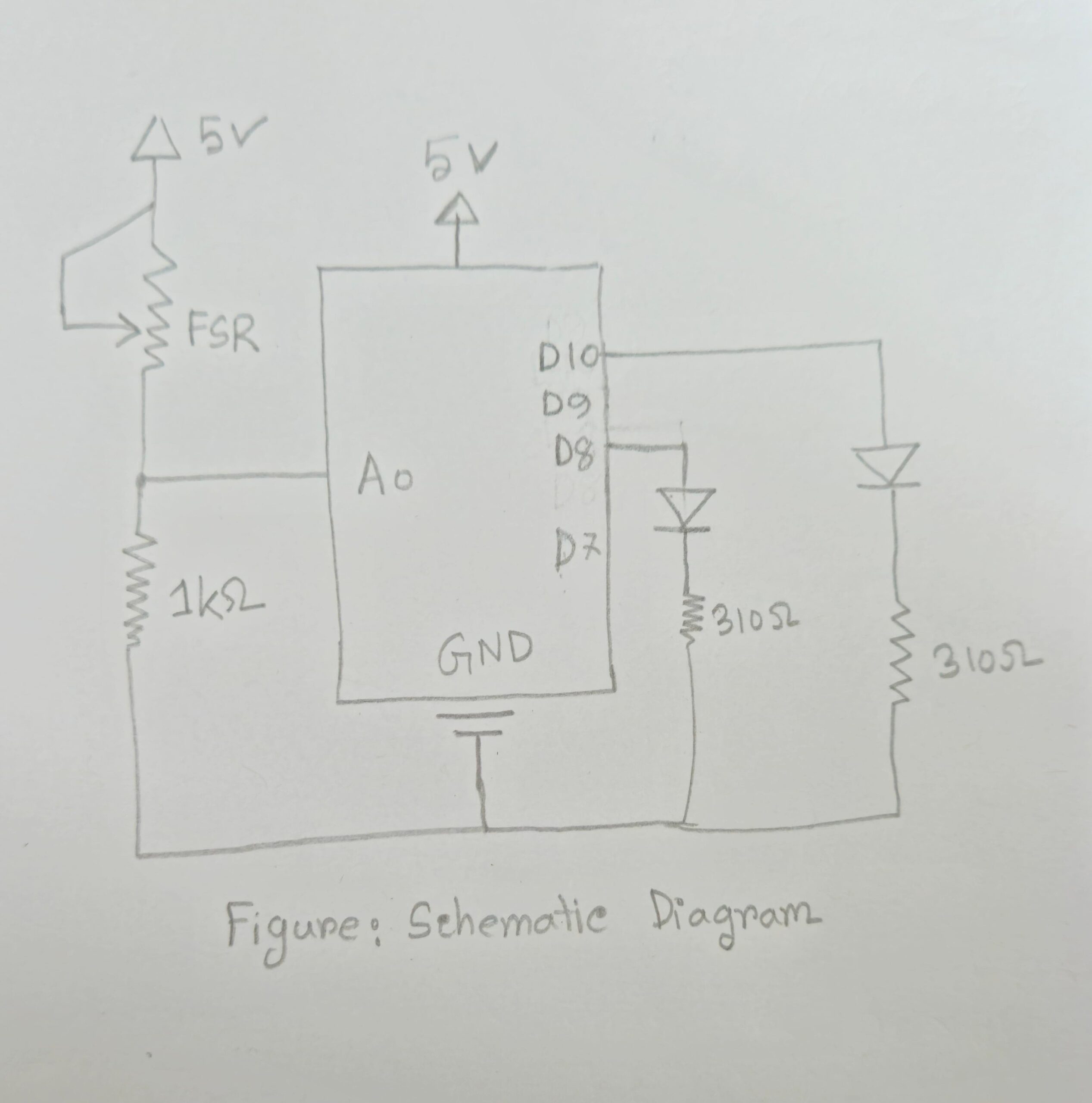
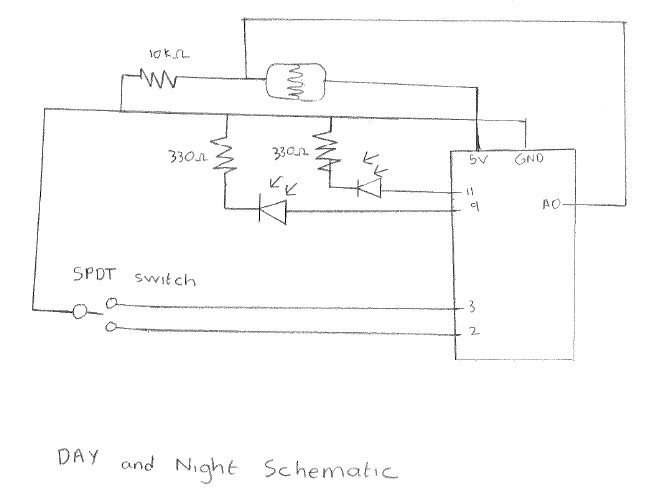
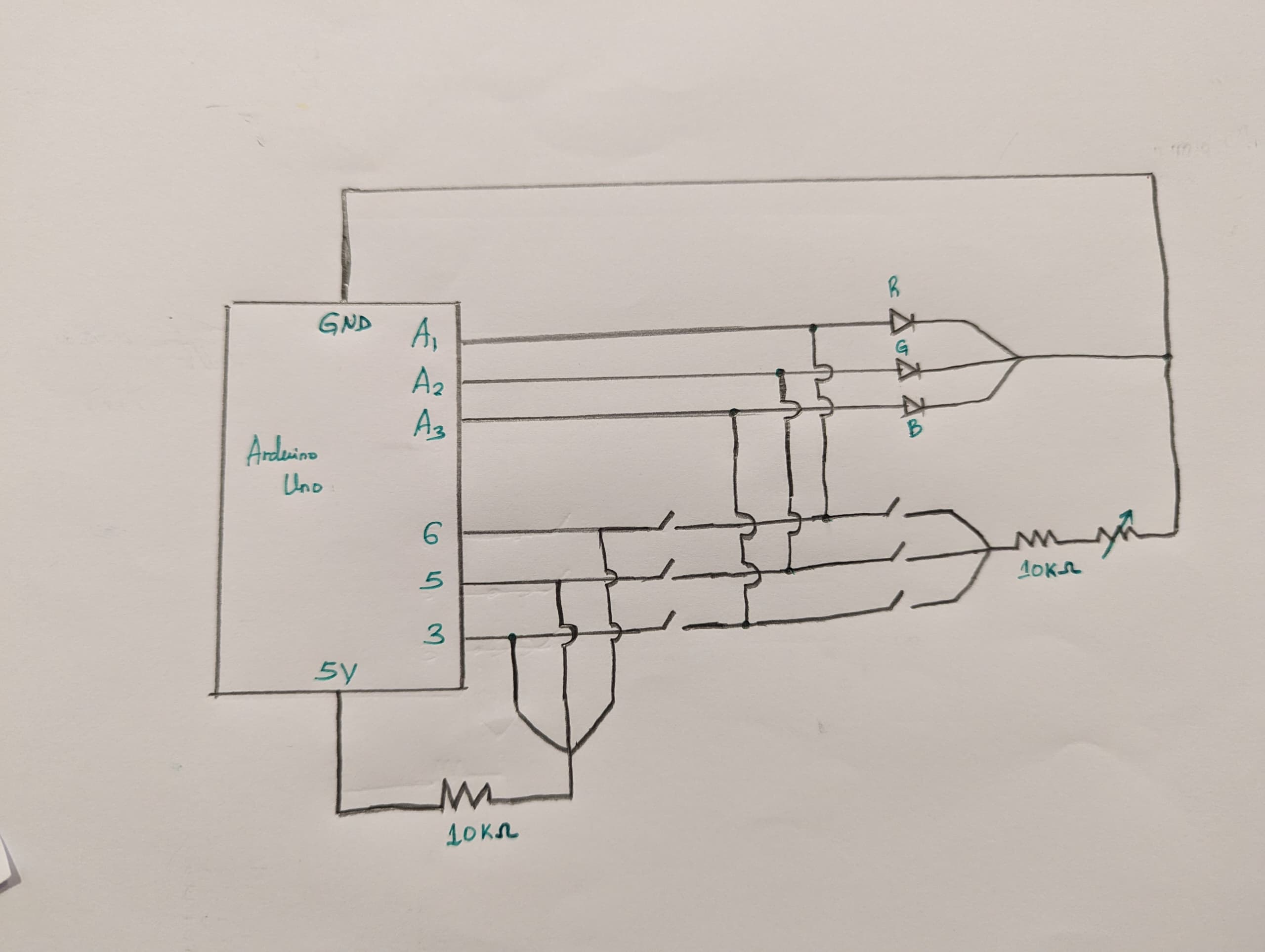
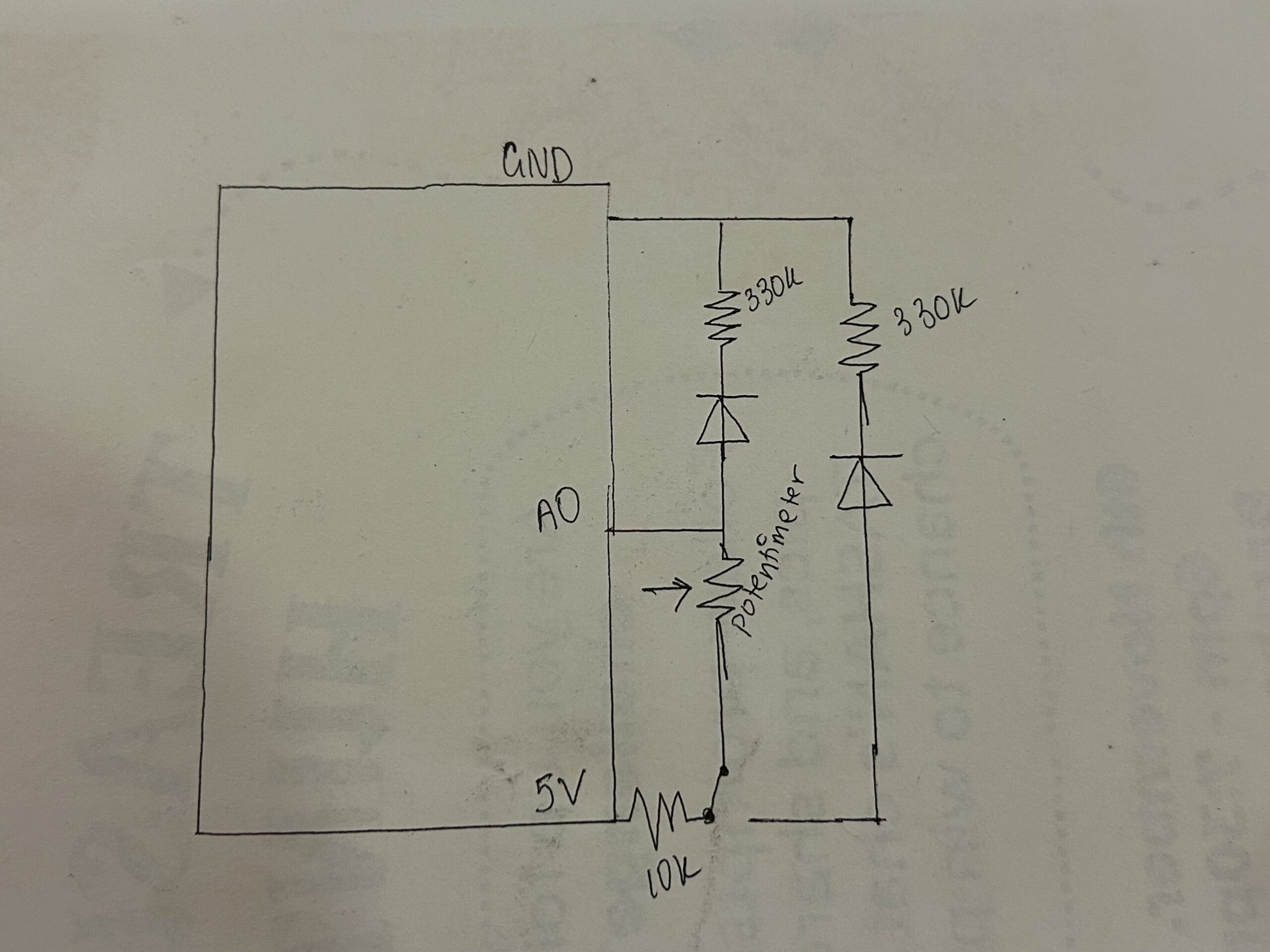
Schematics:
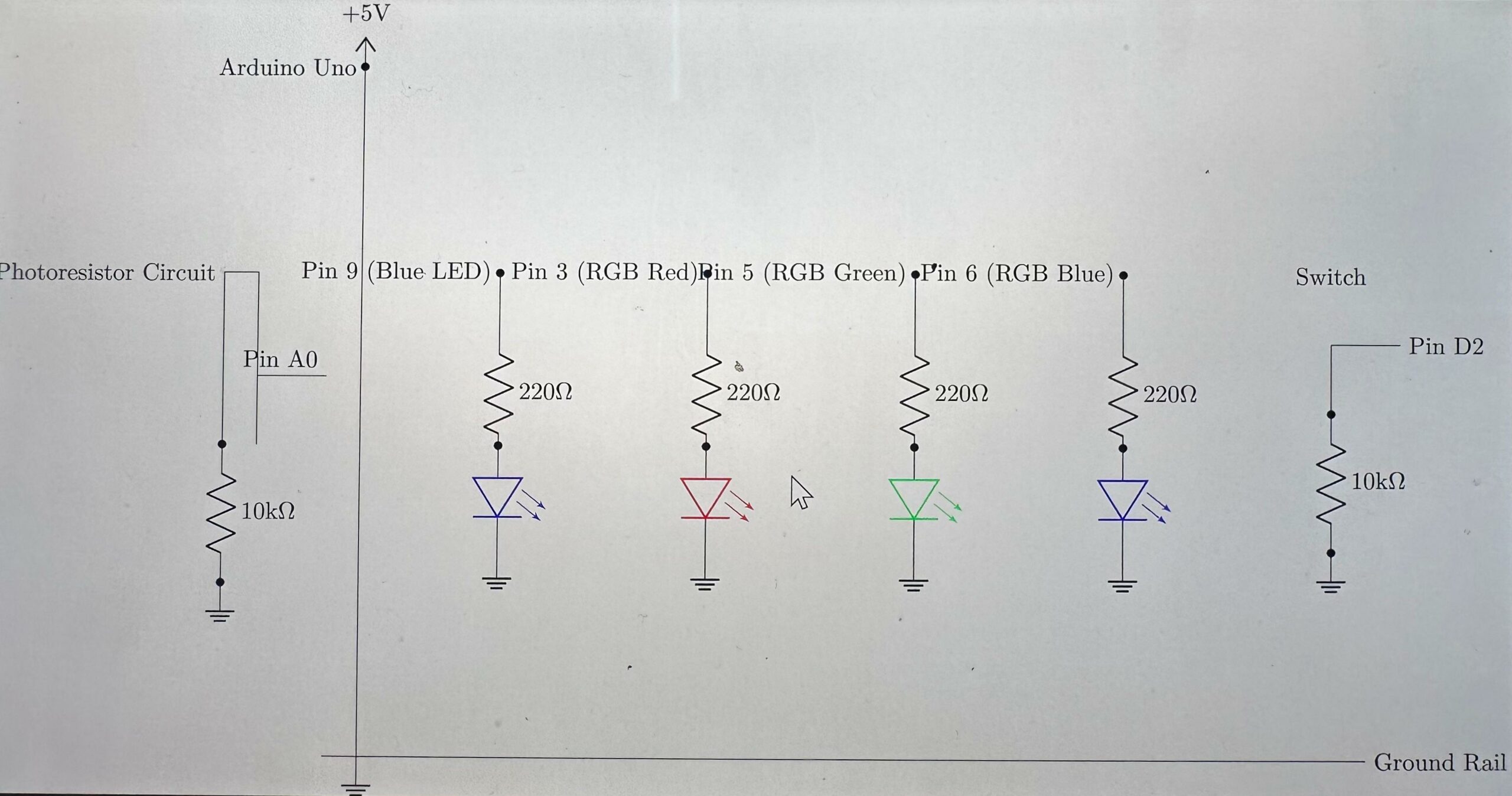
Workings:
The blue led is shone directly into a photoresistor. When the switch is used to turn it off, the photoresistor reading goes down which triggers the sunrise sequence on the rgb led. It is demonstrated that the photoresistor triggers the sequence and not the button press as even when the photoresistor is covered with a finger with the blue led on, the reading goes down and the sunrise sequence is initiated.
Future Considerations:
I had tremendous fun working on this project especially learning how the rgb led works. In the future I’d like to add more leds which trigger different sequences in the rgb led or perhaps a sound aspect to it as well where a loud sound triggers the sequence.