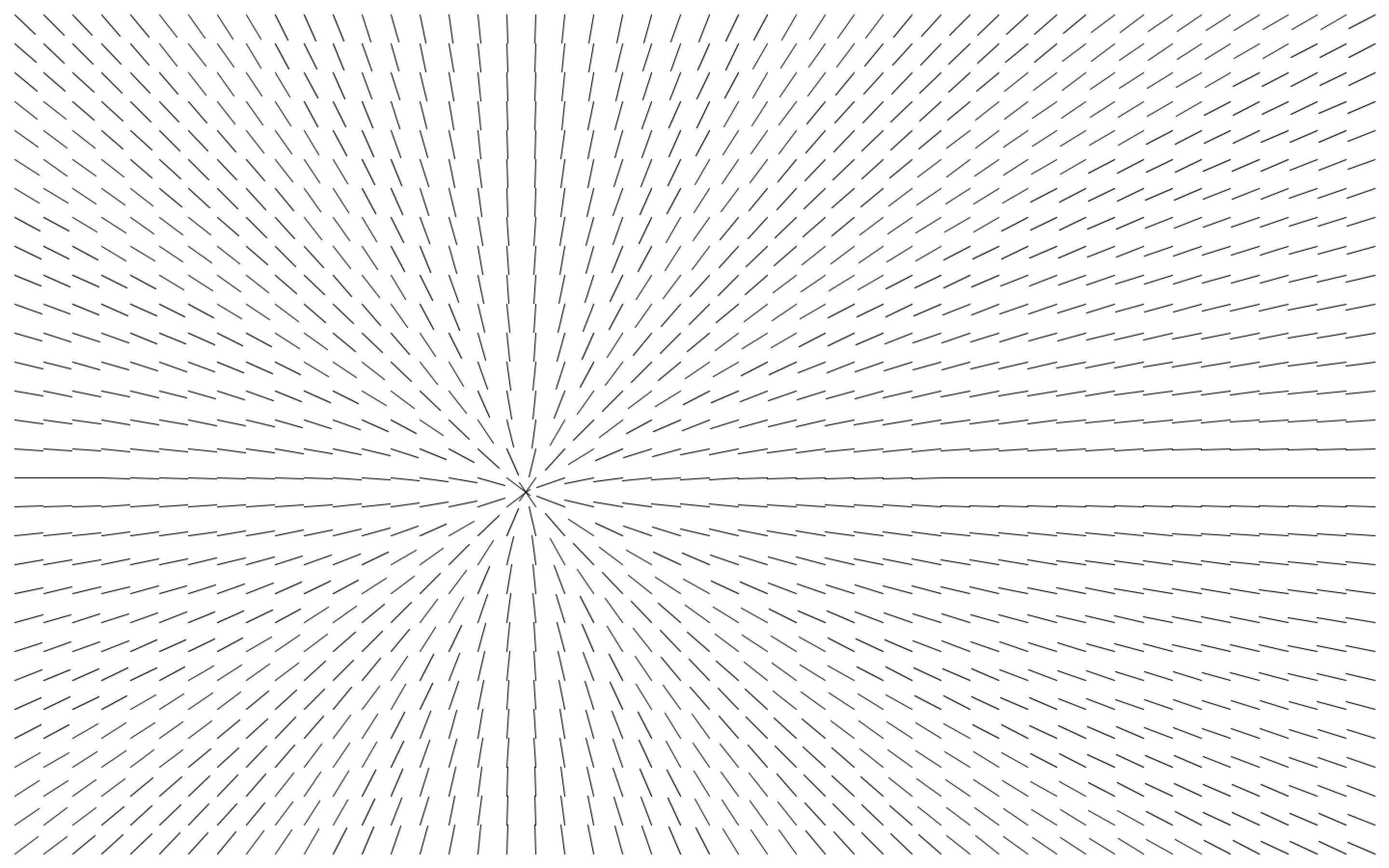
Main Sketch:
// declare an array of DirectionLines
DirectionLine lines[];
void setup() {
fullScreen();
//how long will each line be
int lineLength = 30;
//we can find out how many lines we will have
//by dividing width and height by the lineLength
int w = width/lineLength;
int h = height/lineLength;
//initialize the array with number of total lines
lines = new DirectionLine[w*h];
//index to access each element of the array
int i=0;
//nested for loop, start at lineLength/2 to offset and center the lines on screen
//increase each step through the loops by lineLength, to space the lines appropriately
for (int y=lineLength/2; y<height; y+=lineLength) {
for (int x=lineLength/2; x<width; x+=lineLength) {
//access each DirectionLine in the way and create a new DirectionLine object
//the x & y vairbales from the for loops give us the origin location of each line
lines[i] = new DirectionLine(x, y, lineLength);
//be sure to increase i
i++;
}
}
}
void draw() {
background(255);
//just loop through all the lines and call run()
for (int i=0; i<lines.length; i++) {
lines[i].run();
}
}
Class:
class DirectionLine {
//variables
float angle;
float len;
PVector origin;
//constructor
DirectionLine(float x, float y, float _len) {
origin = new PVector(x, y);
len = _len;
angle=0;
}
//FUNCTIONS\\
//update our angle based on the mouse position
void update() {
//turn the mouse into a pvector in order to use the pvector functions
PVector destination = new PVector(mouseX, mouseY);
//subtract the origin from the destination, this is our direction
PVector direction = PVector.sub(destination, origin);
//get the angle of the direction
angle = direction.heading();
}
//draw the line
void display() {
pushMatrix();
//translate and rotate the line based on the angle
translate(origin.x, origin.y);
rotate(angle);
line(0, 0, len, 0);
popMatrix();
}
//function to wrap up both update and display
void run() {
update();
display();
}
}