
Exercise 1
- Drawing an ellipse and making it move horizontally based on photoresistor
Code:
let x=0;
function setup() {
createCanvas(400,400);
textSize(18);
}
function draw() {
if (serialActive){
background("white");
ellipse(map(x,0,1023,0,400),height/2,50,50);
}else{
background("white");
console.log("not connected");
}
}
function keyPressed() {
if (key == " ") {
// important to have in order to start the serial connection!!
setUpSerial();
}
}
function readSerial(data) {
if (data != null) {
x = int(data);
}else{
x = 0;
}
}
//Arduino code
// void setup() {
// Serial.begin(9600);
// pinMode(A0, INPUT);
// }
// void loop() {
// Serial.println(analogRead(A0));
// }
Exercise 2
- Increase the brightness of the LED with mouse click

Code:
let bright=0;
function setup() {
createCanvas(400,400);
textSize(18);
}
function draw() {
if (serialActive){
background("white");
text(bright,10,10);
}else{
background("white");
console.log("not connected");
}
}
function keyPressed() {
if (key == " ") {
// important to have in order to start the serial connection!!
setUpSerial();
}
}
function mousePressed(){
if(serialActive){
bright+=1;
writeSerial(bright);
}
}
function readSerial(data) {
}
//Arduino code
// int brightness;
// void setup() {
// Serial.begin(9600);
// pinMode(9, OUTPUT);
// }
// void loop() {
// brightness = Serial.parseInt();
// analogWrite(9,brightness);
// }
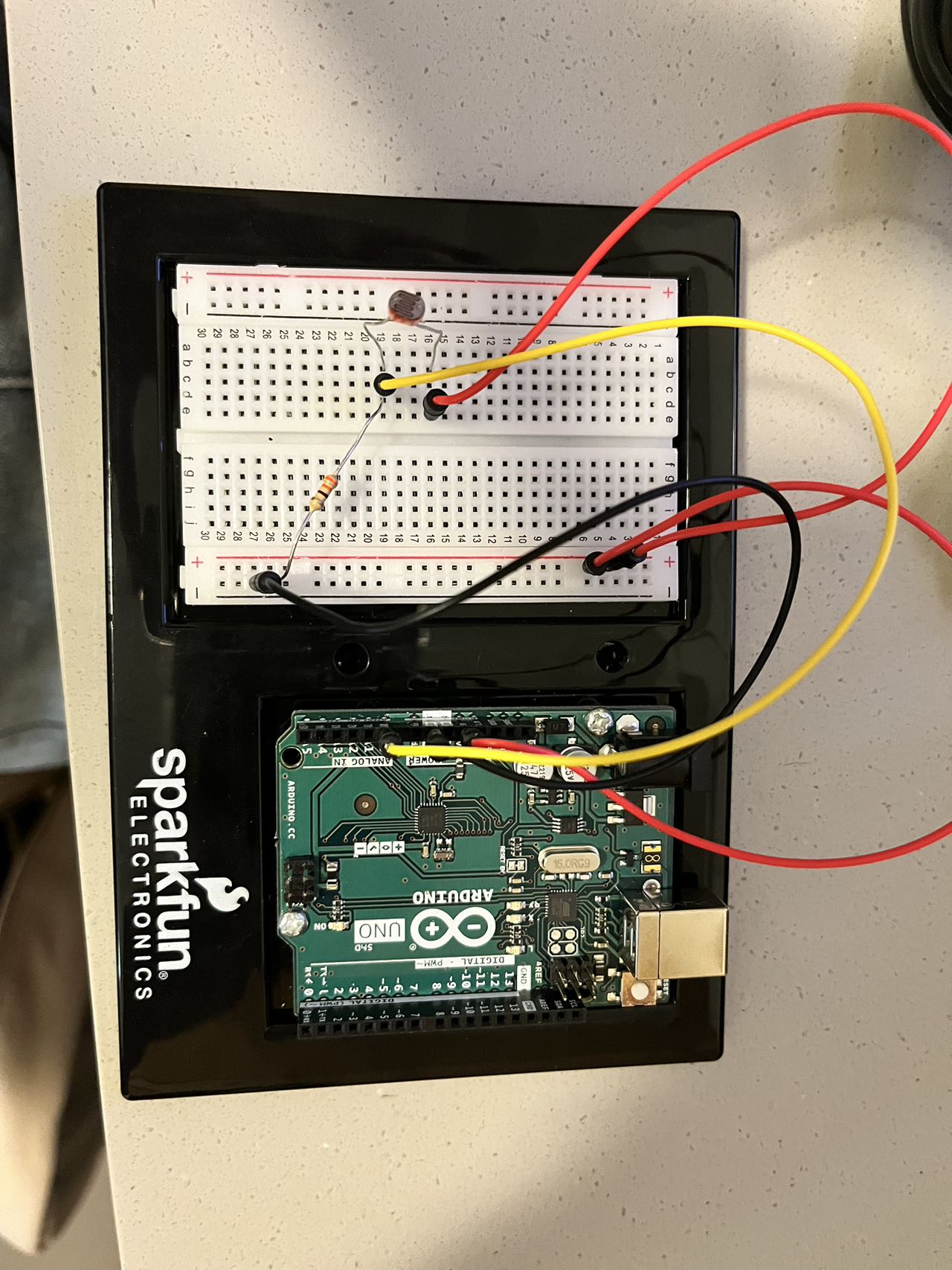
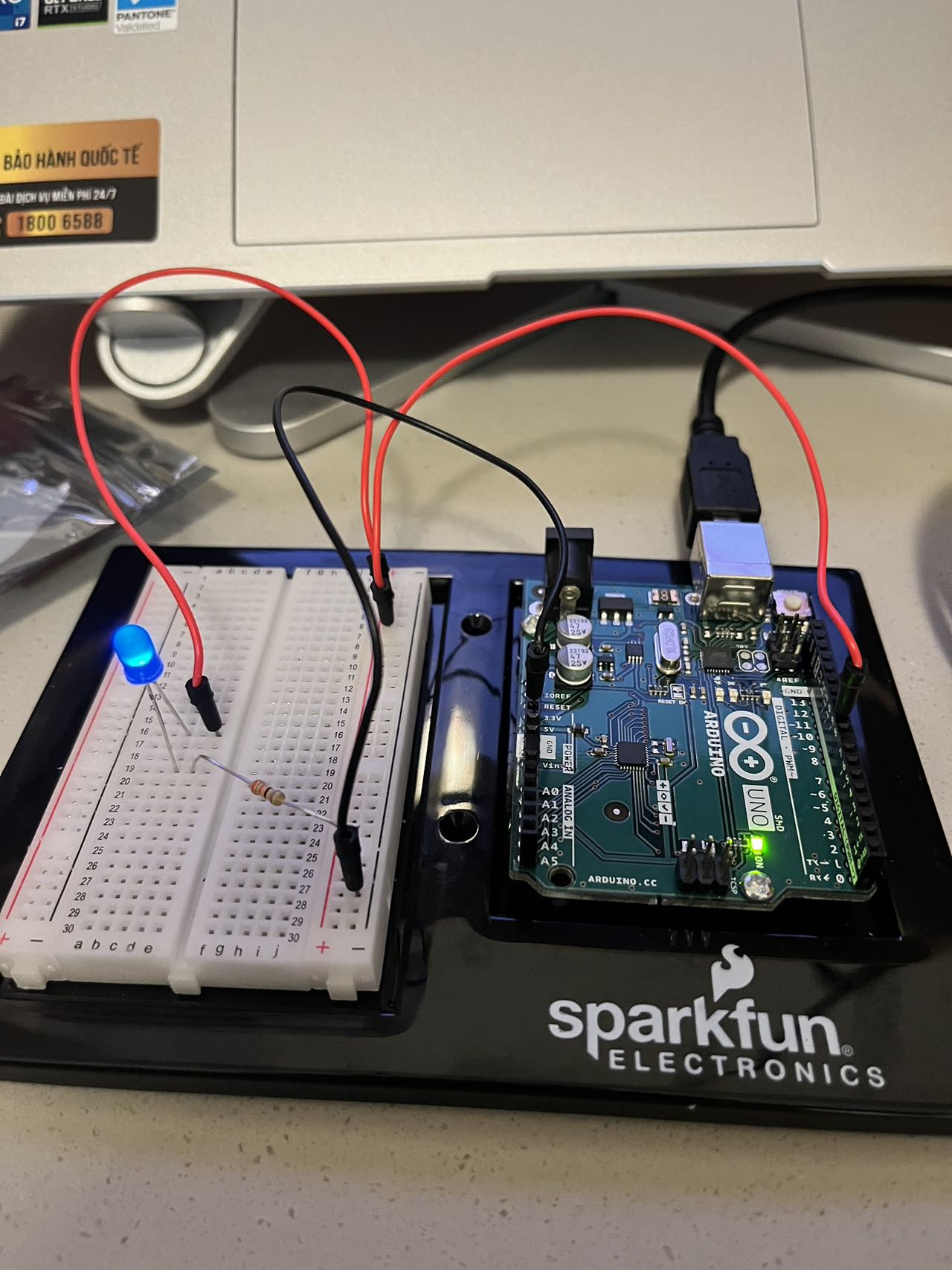
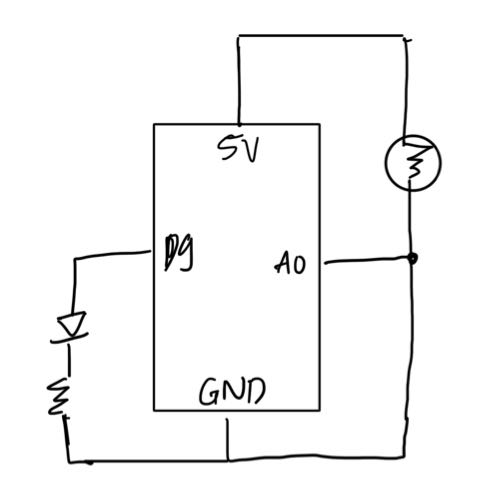
Exercise 3
- Turning on LED when the ball bounces and use photoresistor to control wind movement
Circuit
Video:
Code:
let velocity;
let gravity;
let position;
let acceleration;
let wind;
let drag = 0.99;
let mass = 50;
let bounce = 0;
function setup() {
createCanvas(640, 360);
noFill();
position = createVector(width/2, 0);
velocity = createVector(0,0);
acceleration = createVector(0,0);
gravity = createVector(0, 0.5*mass);
wind = createVector(0,0);
}
function draw() {
background(255);
if(!serialActive){
console.log("PRESS a TO CONNECT");
}
else{
applyForce(wind);
applyForce(gravity);
velocity.add(acceleration);
velocity.mult(drag);
position.add(velocity);
acceleration.mult(0);
ellipse(position.x,position.y,mass,mass);
if (position.y > height-mass/2) {
velocity.y *= -0.9; // A little dampening when hitting the bottom
position.y = height-mass/2;
bounce = 1;
}else{
bounce = 0;
}
}
}
function applyForce(force){
// Newton's 2nd law: F = M * A
// or A = F / M
let f = p5.Vector.div(force, mass);
acceleration.add(f);
}
function keyPressed(){
if (keyCode==LEFT_ARROW){
wind.x=-1;
}
if (keyCode==RIGHT_ARROW){
wind.x=1;
}
if (key==' '){
mass=random(15,80);
position.y=-mass;
velocity.mult(0);
}
if (key == "a") {
// important to have in order to start the serial connection!!
setUpSerial();
}
}
function readSerial(data) {
if (data != null) {
console.log(data);
wind.x = map(int(data), 0, 1023, -2, 2);
writeSerial(bounce + '\n');
}
}
//Arduino code
// int bounce;
// void setup() {
// Serial.begin(9600);
// pinMode(9,OUTPUT);
// while (Serial.available() <= 0) {
// Serial.println("0"); // send a starting message
// }
// }
// void loop() {
// while(Serial.available()){
// bounce = Serial.parseInt();
// if (Serial.read() == '\n') {
// digitalWrite(9,bounce);
// }
// }
// int sensor = analogRead(A1);
// Serial.println(sensor);
// // Serial.println(analogRead(A0));
// }