
Concept:
Final results for you convenience: https://youtu.be/6M-4nbYk2Is
Initially, the idea of using a switch that didn’t require hands felt challenging to execute. However, after some contemplation, the thought process shifted: if not manually, perhaps turning on the switch wirelessly would be ideal. My initial idea was to see if I could use my laptop to turn on the light with a clap. This, however, didn’t work for two main reasons: 1) it still required using my hands, and 2) the claps were too soft, as sound is typically best detected in a controlled setting. I then considered if I could control the light by turning my head left or right. Once this idea settled, the execution began.
Design and Execution:
The following schematic represents the electrical connection for the Arduino Uno board:
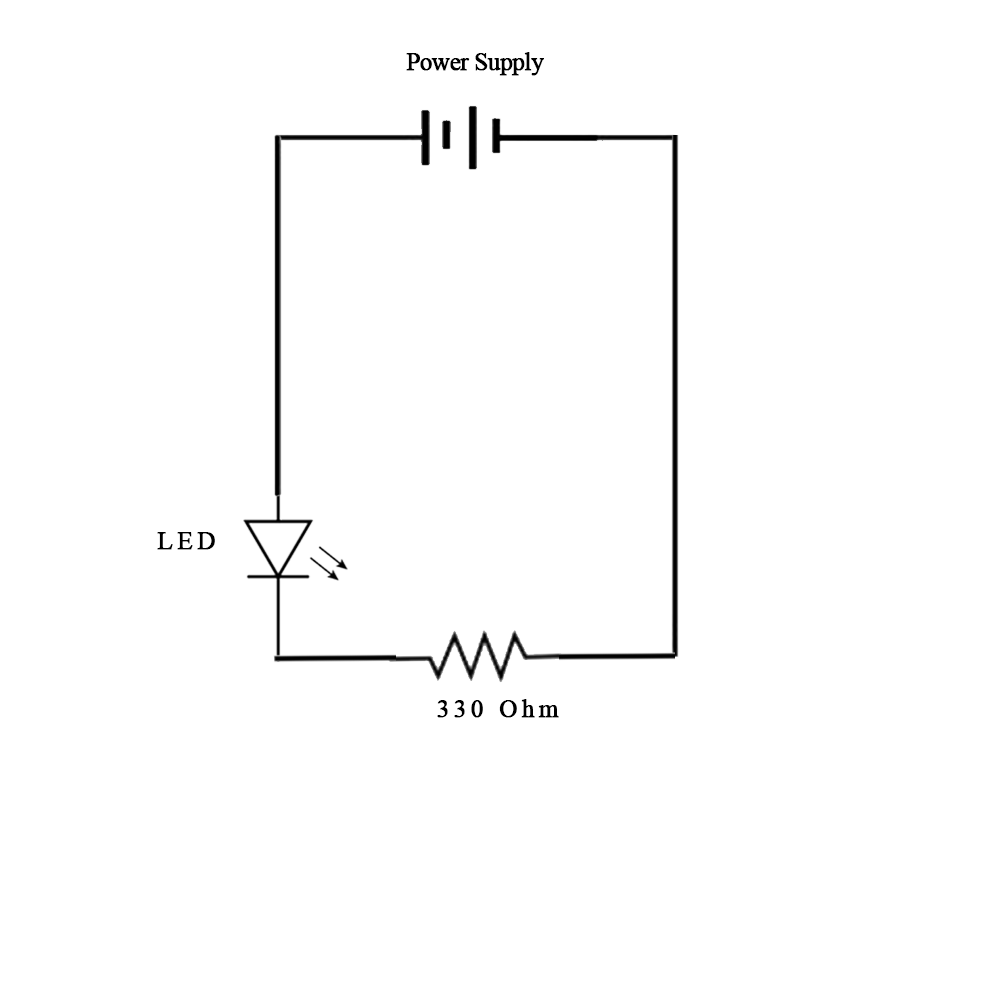
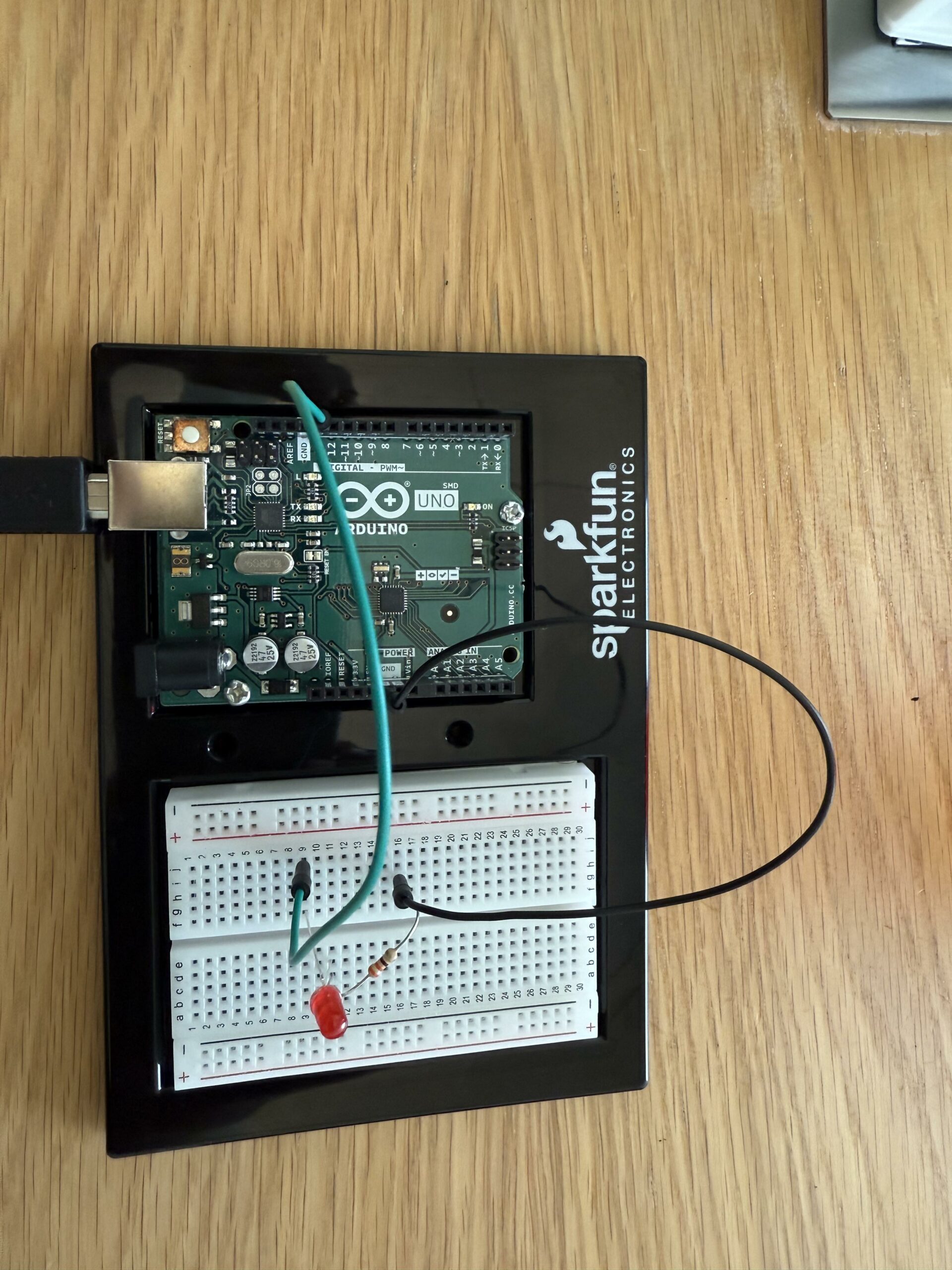
The final connection represented by the image above can be found from the image below:
Finally, the magic that brought everything together was not only the Arduino code but also a Python script, with a bit of help from everyone’s favorite chatbot. The following code was used in the Arduino IDE:
const int ledPin = 13; // Pin connected to the LED
void setup() {
Serial.begin(9600); // Initialize serial communication
pinMode(ledPin, OUTPUT); // Set the LED pin as output
}
void loop() {
if (Serial.available() > 0) { // Check if data is available on the serial port
char command = Serial.read(); // Read the incoming byte
if (command == '1') {
digitalWrite(ledPin, HIGH); // Turn LED on
} else if (command == '0') {
digitalWrite(ledPin, LOW); // Turn LED off
}
}
}
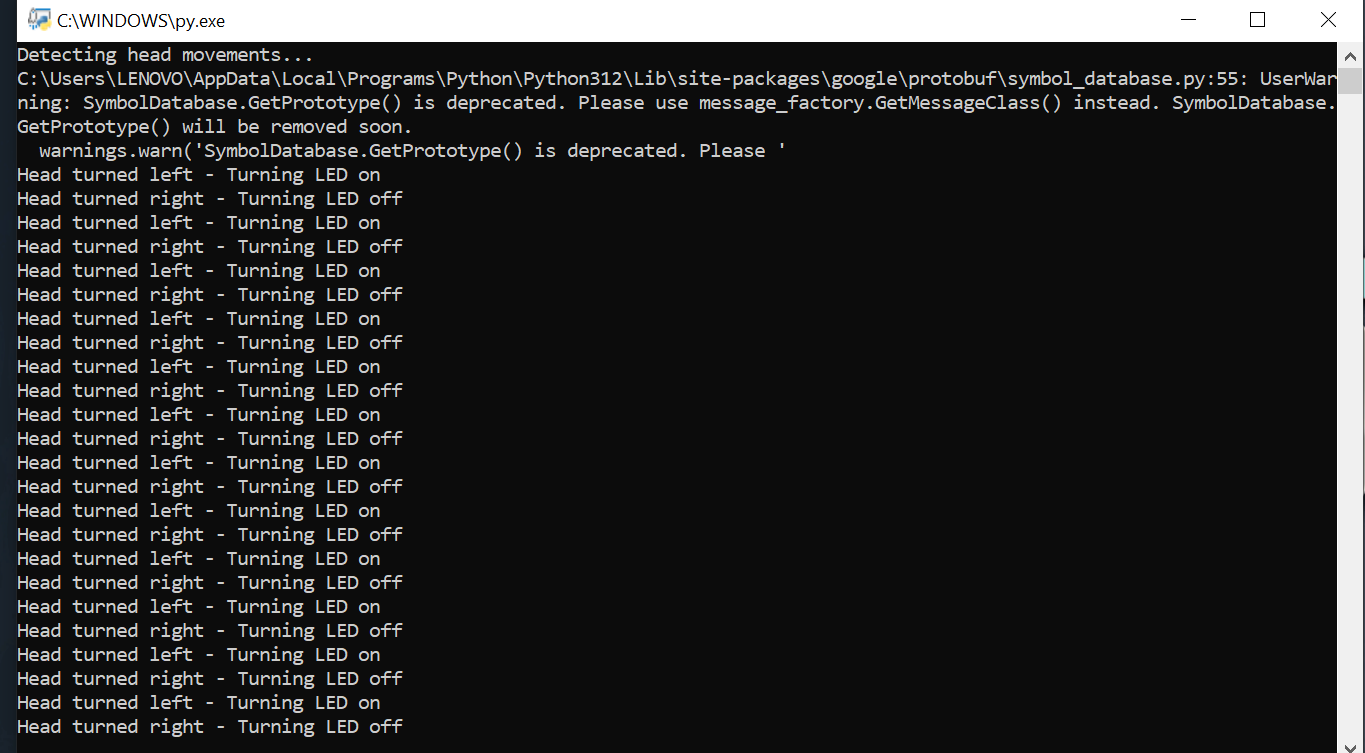
I then ran the Python code in my terminal, which activated the camera. Head tracking began, and from that point, turning my head to the left switched the light on, while turning it to the right switched it off. The following portion of the code made this possible:
while True:
# Capture a frame from the camera
ret, frame = cap.read()
if not ret:
break
# Convert frame to RGB
rgb_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
# Process the frame with Mediapipe
results = face_mesh.process(rgb_frame)
# If a face is detected, analyze head direction
if results.multi_face_landmarks:
landmarks = results.multi_face_landmarks[0].landmark
direction = calculate_turn_direction(landmarks)
if direction < LEFT_THRESHOLD and not led_on:
print("Head turned left - Turning LED on")
arduino.write(b'1') # Send signal to Arduino to turn LED on
led_on = True
elif direction > RIGHT_THRESHOLD and led_on:
print("Head turned right - Turning LED off")
arduino.write(b'0') # Send signal to Arduino to turn LED off
led_on = False
# Display the frame (optional)
cv2.imshow("Head Movement Detection", frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
Final Project:
Have a look at how the final project turned out in this short YouTube video:
Here is a progress of what happens when the user turns their head left and right:
Final Thoughts & Reflection:
This homework exercise was both fun and enjoyable. It pushed me to learn Arduino while thinking creatively about solving problems. Throughout the project, I kept considering how it might be integrated into my final project. So, instead of making this exercise long and complex, I approached it as a potential feature for the final project. That’s where I envision improvements and a broader application of this single project. That’s all for now!