
Cat Composer
By Sneheel & Angela
Concept:
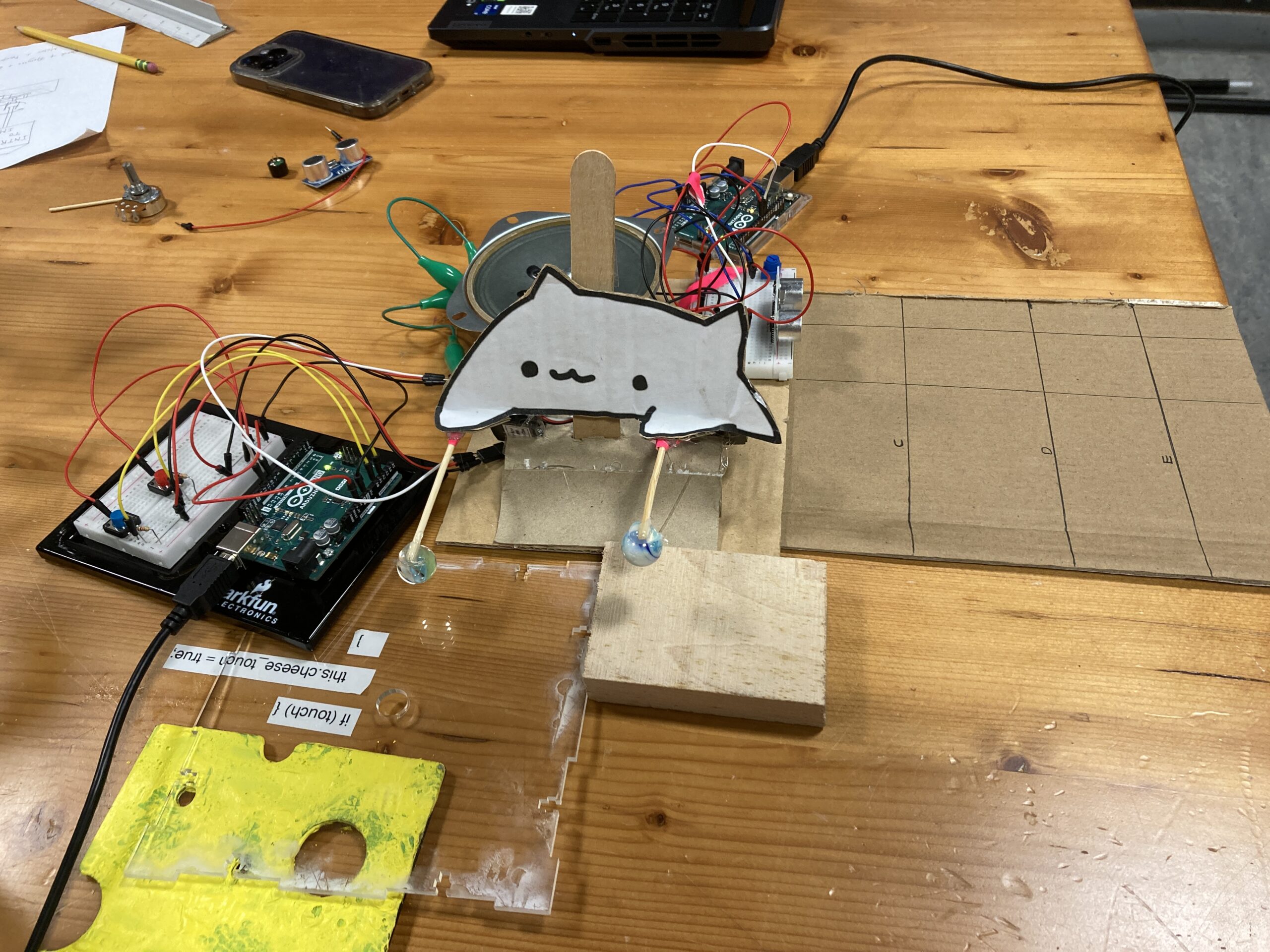
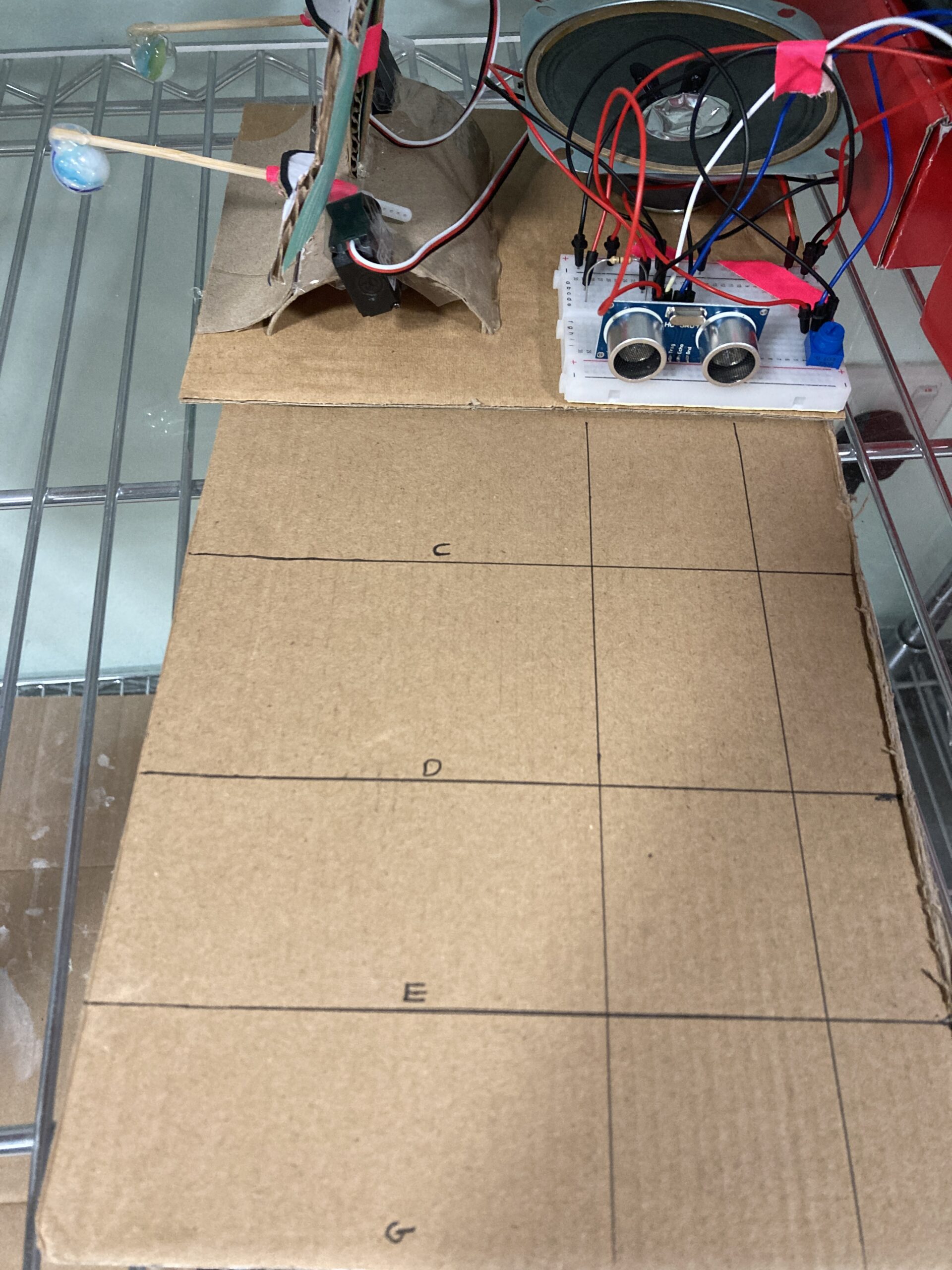
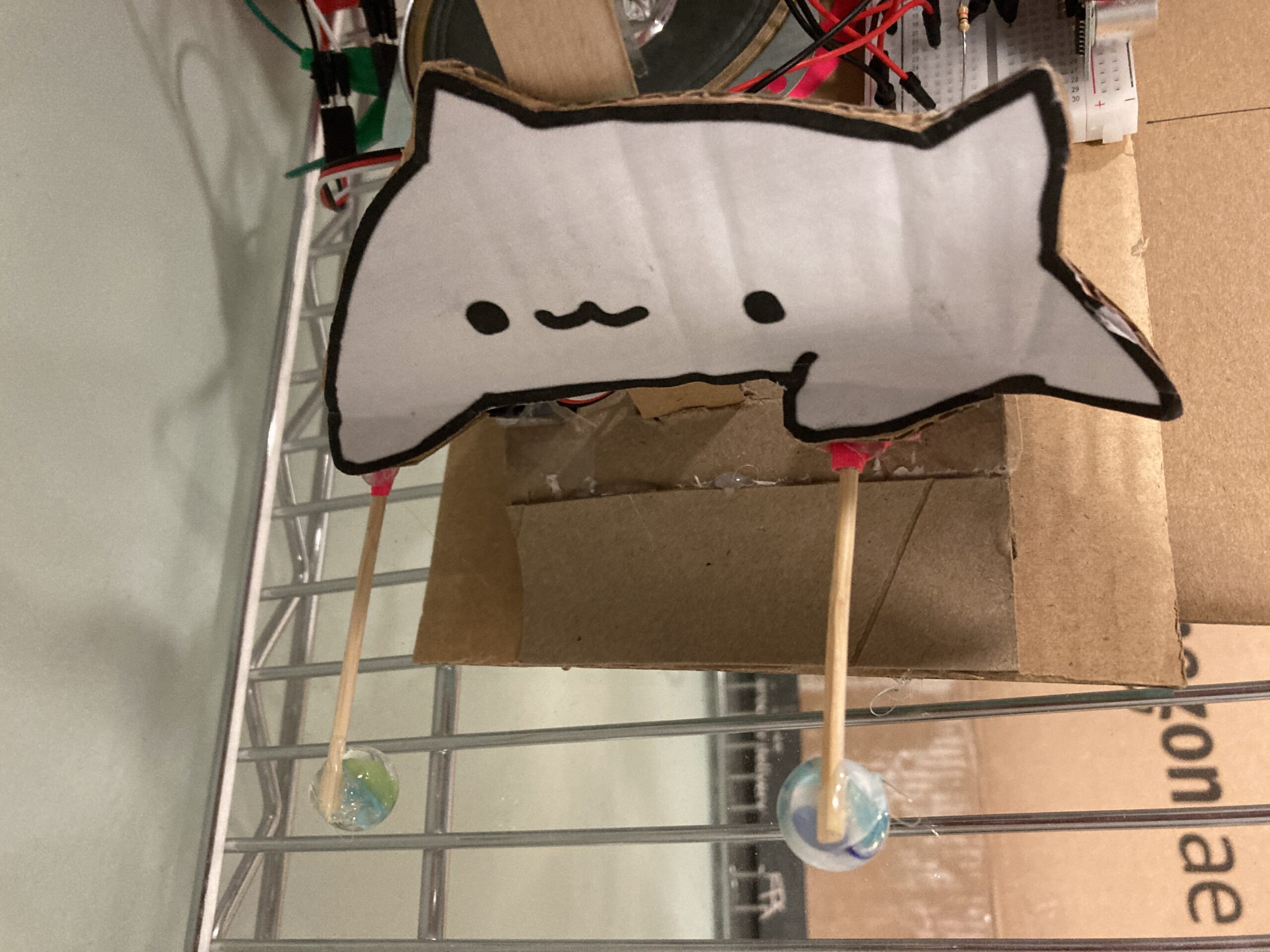
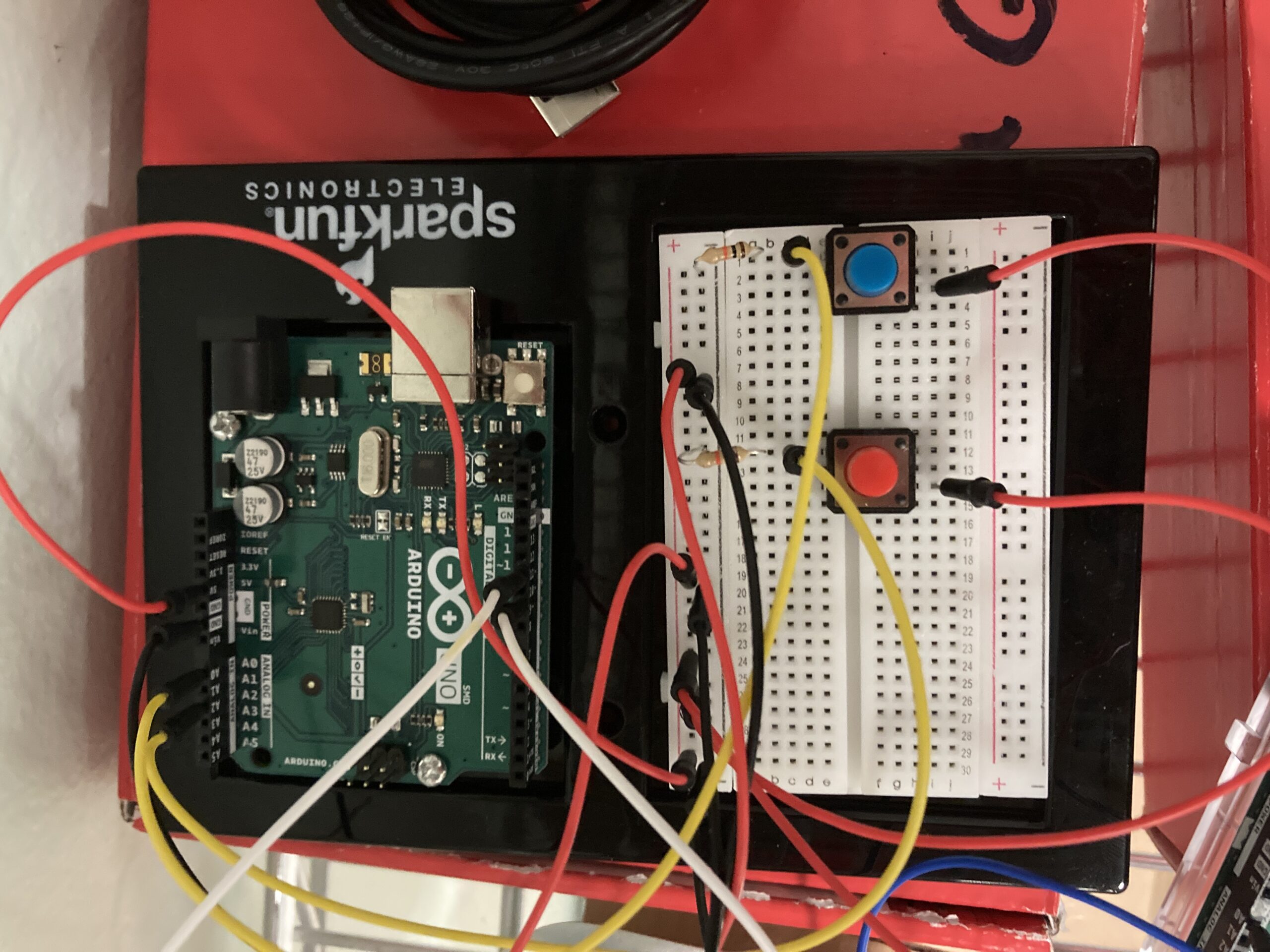
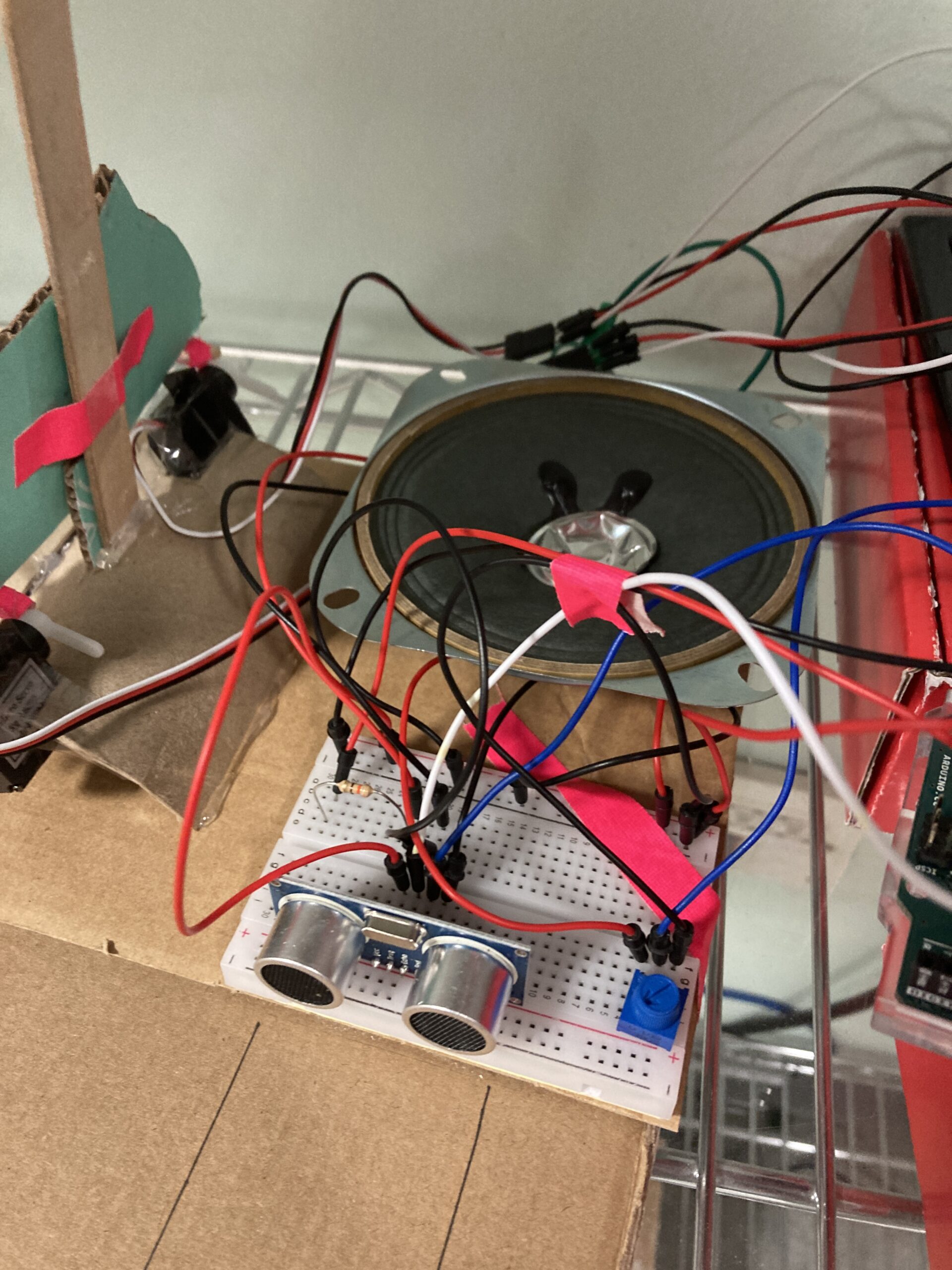
While working on this project, we went over several ideas on how we would make an instrument. One thing we discovered in our ideation process was that both of us had previously made projects that centrally involved cats. Thus, with some more tinkering around – we came up with “The Cat Composer”! The Cat Composer is an all in one musical instrument that can play a variety of simple tunes such as “Hot Cross Buns” and “Mary Had a Little Lamb”. It consists of 2 switches to control 2 beat-making servo motors, a distance sensor to control the notes (C, D, E, and G), and a turning potentiometer to toggle between octaves. Additionally, we incorporated a speaker from the IM Lab inventory to make a better sound than the provided buzzer. This instrument is best played with two people, one to play percussion/toggle between octaves, and one to play the notes.
However, with a bit of practice it is completely possible to play it by oneself! Note: In order for the distance sensor to receive a steady input and play the correct notes, it is best to play not with one’s hands, but with a larger piece of material.
Code & Highlights:
The toughest part in the coding process was to ensure that the distance sensor worked exactly as we intended. For example, an issue that we ran into early was the abrupt changing of tune at the border values. Since the sensor isn’t accurate to the exact cm. It would then fluctuate between two tunes. We corrected this by instead using a 5-value moving average. This makes transitions significantly smoother (and the experience much more enjoyable!!)
unsigned int measureDistance() {
const int numReadings = 5; // Number of readings to average
const int maxChange = 150; // Maximum acceptable change in cm between readings
static unsigned int lastAverage = 0; // Store the last valid average distance
unsigned long totalDuration = 0;
for (int i = 0; i < numReadings; i++) {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
totalDuration += pulseIn(echoPin, HIGH);
delay(10); // Short delay between readings
}
unsigned int currentAverage = (totalDuration / numReadings) * 0.034 / 2;
// Check if the change from the last average is within the expected range
if (abs((int)currentAverage - (int)lastAverage) <= maxChange || lastAverage == 0) {
lastAverage = currentAverage; // Update the last valid average
return currentAverage;
} else {
return lastAverage; // Return the last valid average if the current reading is an outlier
}
}
Room for improvement:
We can improve our project significantly given more time!
Firstly, we would love the diversify the sounds our project can generate. In our research we discovered that instead of simply using tone() we could perhaps use some other sound generating function. We would love to try this!
Regarding the hardware implementation, the provided potentiometer is too hard to turn and often messes with the wiring. Instead we would love to use a better/larger potentiometer that allows us better access.
Similarly, another change we would like to do is to use a single Arduino Board and breadboard rather than our current 2 board solution. This will make the project more cohesive. Even though this seems easy enough to implement, we let our current design be as of now to simplify our approach.
Lastly, the ultrasonic distance sensor often gives outlier readings. As discussed in the highlight section, we tried our best to resolve this issue, however it still persists. We have some more ideas to remedy this. But we believe that given the scope of this project this was unnecessary. However, we would love to do this in the future.