Project Outline
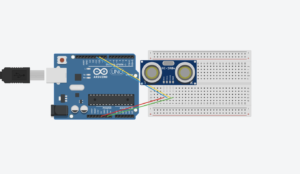
So for this project, we will be using an Arduino Uno Board and an SR-04 Ultrasonic sensor, a breadboard, and a few wires. So this game is built upon the midterm game that I have created previously, Drowning Diver. But this time around, the game is controlled with an ultrasonic sensor that feels the distance between whatever is put in front of it. When sensor is covered it goes up, when user puts his fingers away that cover sensor the diver goes down and drowns))
To be honest, I really wanted to make a game using screen. Last lesson when we were having a group discussion of our ideas, Alima has mentioned that we have a so-called screen that can display on it. That was the time when I got so excited to working with it, but immediately that idea backfired.
PROCESSING CODE
PImage wall;
PImage character;
import processing.serial.*;
int DistanceUltra;
int IncomingDistance;
Serial myPort;
String DataIn;
Pipe p1 = new Pipe();
Pipe p2 = new Pipe();
Pipe p3 = new Pipe();
//bird height and width location
float birdy = 46;
float birdx = 56;
float gravity = 5;
//float jumpForce = 15;
//the speed of the pipes
int speed;
//score and game state
boolean gameOver = false;
int score = 0;
int highscore = 0;
int point = 1;
color birdColor = color(255, 204, 0);
void setup(){
size(800,400);
wall=loadImage("underwater.png");
character=loadImage("scuba.png");
p1.x = width + 80;
p2.x = width + 200;
p3.x = width + 400;
printArray(Serial.list());
String portname=Serial.list()[2];
println(portname);
myPort = new Serial(this,portname,9600);
myPort.bufferUntil(10);
}
void serialEvent (Serial myPort){
DataIn = myPort.readString();
println(DataIn);
IncomingDistance = int(trim(DataIn));
println("incoming distance="+IncomingDistance);
if (IncomingDistance>1 && IncomingDistance<100 ) { DistanceUltra = IncomingDistance; //save the value only if its in the range 1 to 100 } }
}
}
void draw(){
background(wall);
p1.pipe();
p2.pipe();
p3.pipe();
fill(birdColor);
ellipse(birdx, birdy, 55,55);
// birdy += gravity;
play();
success(p1);
success(p2);
success(p3);
if (IncomingDistance>10)
{
//birdy -= jumpForce;
birdy -= gravity;
}
else
{
birdy += gravity;
}
}
void play(){
if(gameOver == false)
{
speed = 2;
p1.x -= speed;
p2.x -= speed;
p3.x -= speed;
textSize(24);
fill(255,255,255);
text(score, width/2, 30);
}
if(gameOver == true)
{
speed = 0;
p1.x -= speed;
p2.x -= speed;
p3.x -= speed;
if( highscore < score)
{
highscore = score;
}
textSize(16);
fill(0, 102, 153);
textAlign(CENTER);
text("Click : Play Again", width/2, height/2);
text("Score: " + score, width/2, height/2 - 20);
text("High-Score: " + highscore, width/2, height/2 - 40);
if (mousePressed)
{
delay(900);
score = 0;
gameOver = false;
birdy = 100;
birdx = 56;
p1.x = width + 50;
p2.x = width + 220;
p3.x = width + 370;
p1.top = random(height/2);
p1.bottom = random(height/2);
p2.top = random(height/2);
p2.bottom = random(height/2);
p3.top = random(height/2);
p3.bottom = random(height/2);
}
}
}
void success(Pipe test){
if(birdy < test.top || birdy > height - test.bottom)
{
if(birdx > test.x && birdx < test.x + test.w)
{
gameOver = true;
}
}
}
class Pipe
{
float top = random(height/3 + 200);
float bottom = random(height/3 +200);
float x = width + 150;
float w = 70;
color pipeColor = color(0, 255, 0);
void pipe()
{
fill(pipeColor);
rect(x, 0, w, top);
rect(x, height-bottom, w, bottom);
if(x < -100)
{
score += point;
x = width;
top = random(height/2);
bottom = random(height/2);
}
}
}
ARDUINO CODE
const int trigPin=11;
int echoPin=10;
int safezone=10;
//int dpin=13;
void setup()
{
pinMode(trigPin,OUTPUT);
pinMode(echoPin,INPUT);
//pinMode(dpin,OUTPUT);
//digitalWrite(dpin,LOW);
Serial.begin(9600);
}
void loop()
{
long duration,cm; //DECLARE VARIABLES TO STORE SENSOR O/P
digitalWrite(trigPin,LOW); //MAKE THE TRIG PIN LOW
delayMicroseconds(2); //WAIT FOR FEW MICROSECONDS
digitalWrite(trigPin,HIGH); //NOW SET THE TRIG PIN
delayMicroseconds(5); //WAIT FOR FEW MICROSECONDS UNTIL THE TRIG PULSE IS SENT
digitalWrite(trigPin,LOW); //MAKE THE TRIG PIN LOW AGAIN
duration=pulseIn(echoPin,HIGH); //MAKE ECHO PIN HIGH AND STORE THE BOUNCED PULSE IN VARIABLE DURATION
cm=microsecondsToCentimeters(duration);
long inch= cm/2.54;
//if(cm<safezone)
//{
//digitalWrite(dpin,HIGH);
Serial.println(cm);
//delay(500);
//digitalWrite(dpin,LOW);
//}
}
long microsecondsToCentimeters(long microseconds) //SPEED OF SOUND IS 29 uSEC PER CM
{
return microseconds/29/2; //THE PULSE TRAVELS FROM THE SENSOR AND AGAIN COMES BACK SO WE DIVIDE IT BY 2 TO TAKE ONLY HALF OF THE TOTAL DISTANCE
}
SCHEMATICS