
For the “stupid pet trick” assignment, I made a Pacman that “ate” the LEDs coming towards it.
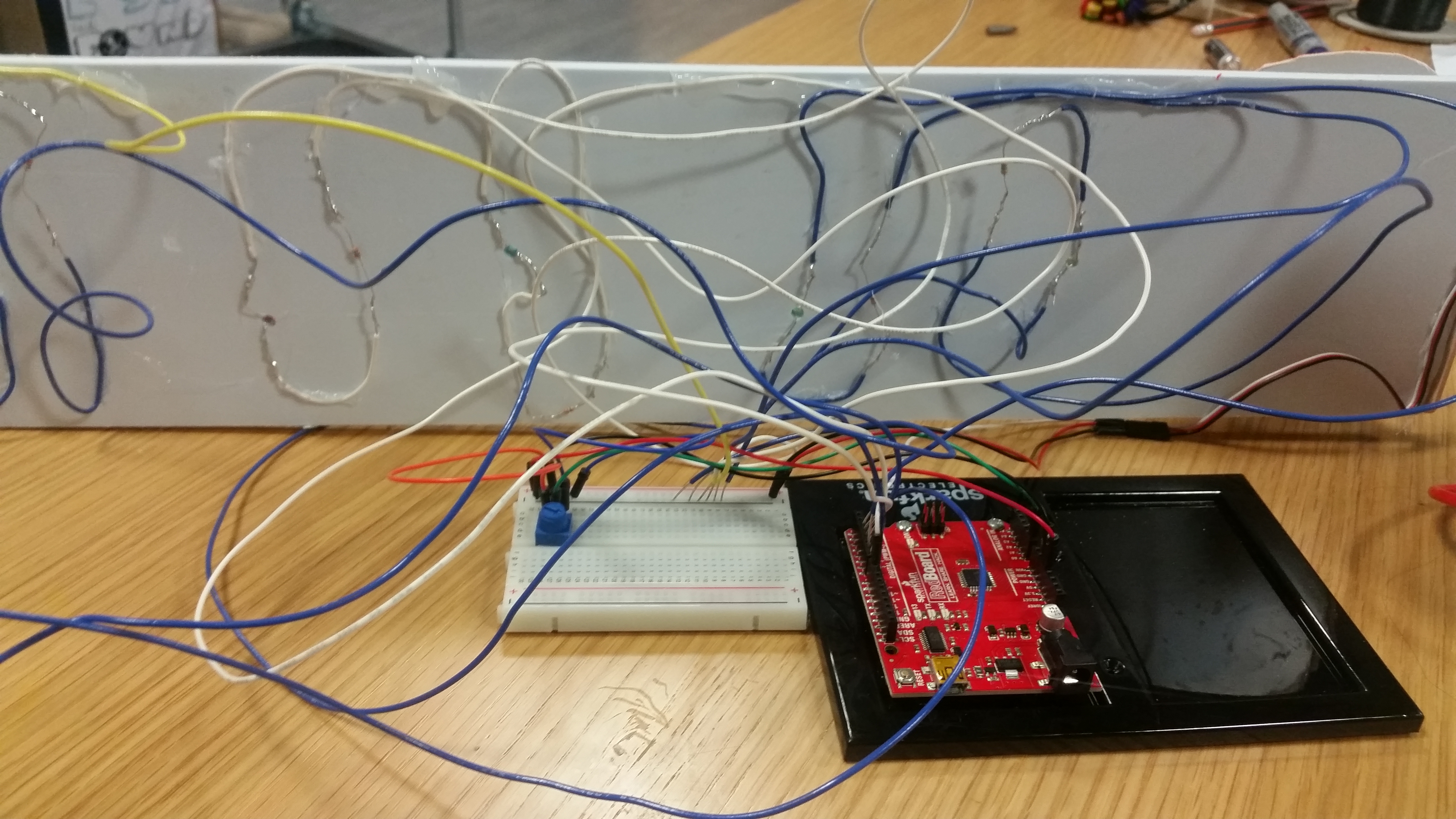
The back is somewhat of a mess, despite my efforts to tidy up the wires as much as possible, just because it was coming out of all over everywhere. I used maximum number of LEDs, which is as many output pins as I had. The speed of the LEDs moving towards the Pacman and the movement of the Pacman can be altered by the potentiometer.
#include <Servo.h>
Servo myservo;
int pos = 90;
int val;
int sensorPin = 0;
int startLED = 2;
int endLED = 7;
void setup() {
// put your setup code here, to run once:
for(int i = startLED; i < endLED + 1; i++){
pinMode(i, OUTPUT);
}
myservo.attach(9);
myservo.write(pos);
}
void loop() {
// put your main code here, to run repeatedly:
int sensorValue = analogRead(sensorPin);
for (int i = startLED; i < endLED + 1; i++){
digitalWrite(i, HIGH);
sensorValue = analogRead(sensorPin);
delay(sensorValue);
digitalWrite(i, LOW);
sensorValue = analogRead(sensorPin);
delay(sensorValue);
}
myservo.write(pos - 45);
delay(sensorValue);
myservo.write(pos);
}
Initially I found that without having to do analogRead before every time I did delay, the effect of turning the potentiometer would also be delayed. As a result, putting analogRead before doing a delay made the Pacman more responsive to the changes of the potentiometer.