Oh boy here it is!
Here is the code
int x, y;
float x2,y2,speedX, speedY;
void setup () {
size (700, 850);
x= width/2;
y= height/2;
x2 = 0;
y2 = 0;
speedX =2;
speedY =5;
}
void draw() {
background(255);
// fill(255,150,0);
//quad(180,340,300,340,300,400,300,460);
//quad (180,640,300,300,300,400,600,460);
//fill (100, 205, 30);
//ellipse( 200, 500, 300, 200);
//ellipse(x, y, 100, 100);
//neck
fill(245,230,195);
stroke(245,230,195);
quad(230, 600, 500, 600, 470, 900, 180, 900);
fill(220, 187, 153);
stroke(237, 187, 153);
quad(150, 700, 500, 700, 400, 800, 230,780);
//face
fill(255,235,203);
stroke(255,235,207);
quad(150, 175, 600, 175,540, 680, 100, 680);
quad(125, 225, 150, 175,175, 750, 100, 680);
quad(125, 225, 175, 750,540, 680, 150, 680);
quad(600, 175, 600, 300,540, 680, 400, 760);
quad(150, 175, 600, 175,400, 760, 175, 750);
//eyes
stroke(0);
fill(255, 240, 240);
arc(240, 350, 70, 70, PI, PI+PI);
fill(255, 240, 240);
arc(430, 340, 70, 70, 0, PI+QUARTER_PI, OPEN);
arc(240, 560, 120, 0, PI+QUARTER_PI, PI);
//pupils
fill(0);
ellipse(430, 345, 15, 15);
ellipse(240, 335, 15, 17);
//nose
fill(255, 230, 211);
stroke(255, 230, 211);
quad(x-40, y, x-20, y- 130, x+10, y-120, y-60, y+60);
//nose
fill(245, 210, 200);
stroke(245, 210, 200);
quad(320, 475, x+50, 465, x+10, y-120, y-60, y+60);
//nose
fill(235, 200, 190);
stroke(235, 190, 190);
quad(320, 500, 320, y+40, 400, 460, 380, 500);
//nose
fill(255, 230, 211);
stroke(255, 230, 211);
quad(x-40, y+100, x-20, y- 130, x+10, y-120, y-60, y+60);
//left eyebrow
fill(147,81,22);
stroke(147,81,22);
quad(190, 300, 280, 295, 300, 330, 210, 315);
//right eyebrow
fill(147,81,22);
stroke(147,81,22);
quad(400, 310, 465, 300, 490, 330, 390, 325);
stroke(0);
line(x+10, y-120, y-60, y+60);
line(y-60, y+60,x-40, y+100);
//top lip
stroke(203, 67, 53);
fill(203, 67, 53);
quad(230, 580, 300, 570, 350, 600, 210, 600);
//top lip
stroke(203, 67, 53);
fill(203, 67, 53);
quad(250, 600, 350, 565, 400, 590, 410, 600);
//bottom lip
stroke(236, 112, 99);
fill(236, 112, 99);
quad(210, 600, 410, 600, 370, 630, 270, 640);
// left ear
stroke(237, 187, 153);
fill(237, 187, 153);
quad(80, 390, 120, 360, 110, 480, 90, 460);
//right ear
stroke(237, 187, 153);
fill(237, 187, 153);
quad(580, 370, 620, 390, 640, 460, 570, 470);
//hair
fill(244, 208, 63);
stroke(244, 208, 63);
quad(350, 50, 500, 70, 650, 170, 390, 140);
fill(244, 220, 80);
stroke(244, 220, 80);
quad(315, 70, 560, 125, 670, 260, 270, 190);
fill(250, 240, 80);
stroke(250, 240, 80);
quad(201, 60, 320, 80, 390, 200, 170, 220);
fill(255, 245, 100);
stroke(255, 245, 100);
quad(120, 80, 230, 100, 260, 210, 100, 230);
////fly
//fill(15, 50, 30);
//ellipse(x2, y2, 40, 20);
//x2 += speedX;
//y2 += speedY;
}
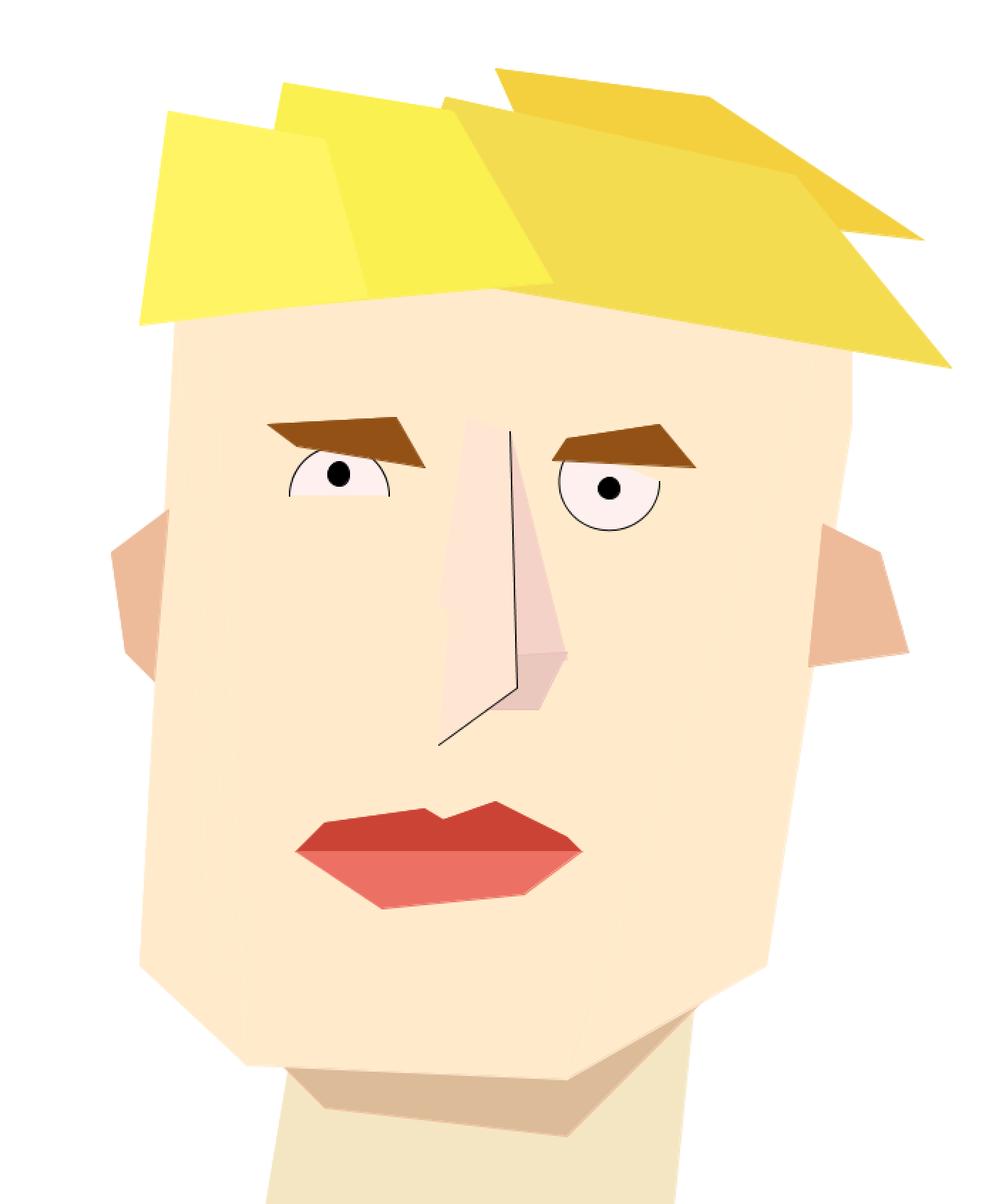
I used a lot of quad functions, because I thought it would most accurately represent the picasso-esque cubist ___ I desired.
I thought my portrait looked annoyed, so I was going to program a little fly to bounce around the screen, but ran out of time to make it as desired. I’m pretty happy with how it came out though.