
Exercise 1
Concept
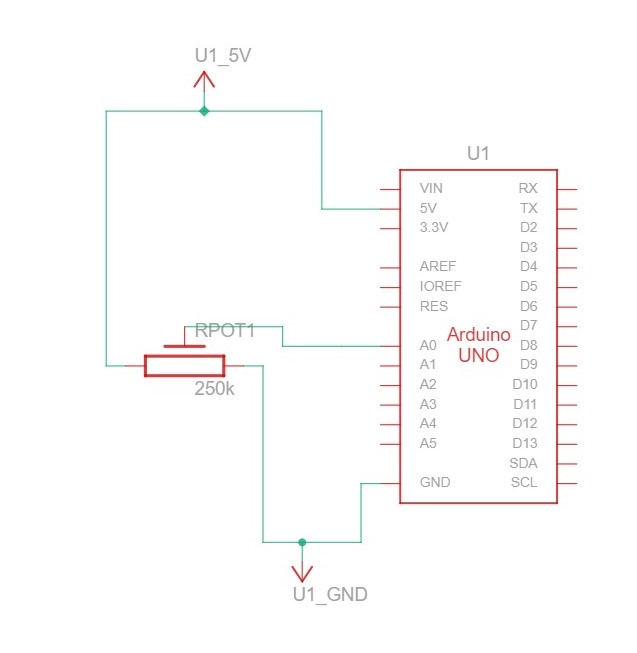
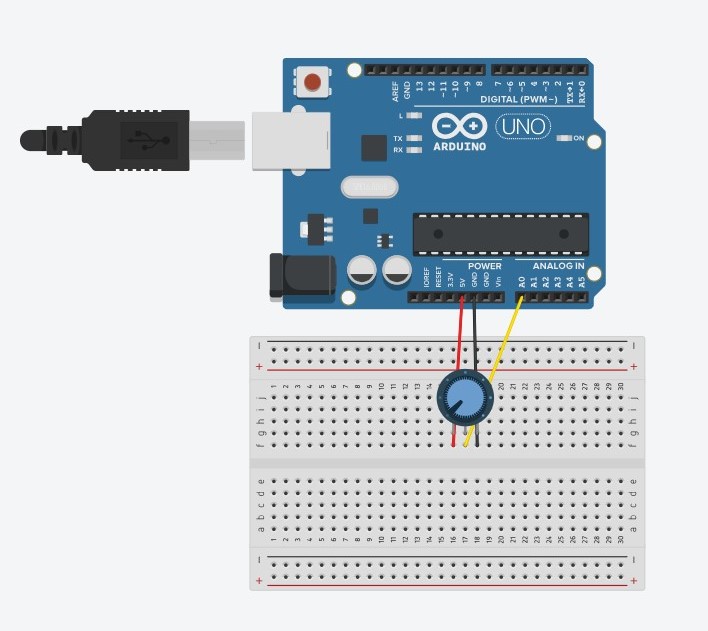
The potentiometer is used to control the x-coordinate of the ellipse drawn in p5.
Code
Arduino:
void setup() {
// Start serial communication so we can send data
// over the USB connection to our p5js sketch
Serial.begin(9600);
// We'll use the builtin LED as a status output..
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
// gets sensor reading
int sensor = analogRead(A0);
delay(5);
// indicates data transfer
digitalWrite(LED_BUILTIN, HIGH);
// sends data to p5
Serial.println(sensor);
// indicates data transfer
digitalWrite(LED_BUILTIN, LOW);
}
p5
// variable to control x-coordinate
let circleX = 0;
function setup() {
createCanvas(640, 480);
textSize(18);
}
function draw() {
// sets background
background(255);
stroke(0);
// draws circle on canvas
// -- circleX is mapped between 0 and the width
circle(map(circleX, 0, 1023, 0, width), height / 2, 50);
// checks if serial communication has been established
if (!serialActive) {
text("Press Space Bar to select Serial Port", 20, 30);
} else {
text("Connected", 20, 30);
}
}
// sets up serial connection
function keyPressed() {
if (key == " ") {
// important to have in order to start the serial connection!!
setUpSerial();
}
}
// This function will be called by the web-serial library
// with each new *line* of data. The serial library reads
// the data until the newline and then gives it to us through
// this callback function
function readSerial(data) {
////////////////////////////////////
//READ FROM ARDUINO HERE
////////////////////////////////////
if (data != null) {
circleX = int(trim(data));
}
}
Video
Exercise 2
Concept
The brightness of an LED is controlled by the mouseX value from p5 mapped between 0 and 255.
Code
Arduino:
// led pin number
int ledPin = 5;
void setup() {
// Start serial communication so we can send data
// over the USB connection to our p5js sketch
Serial.begin(9600);
// We'll use the builtin LED as a status output.
// We can't use the serial monitor since the serial connection is
// used to communicate to p5js and only one application on the computer
// can use a serial port at once.
pinMode(LED_BUILTIN, OUTPUT);
pinMode(ledPin, OUTPUT);
// checks if led works correctly
digitalWrite(ledPin, HIGH);
delay(1000);
digitalWrite(ledPin, LOW);
// start the handshake
while (Serial.available() <= 0) {
digitalWrite(LED_BUILTIN, HIGH); // on/blink while waiting for serial data
Serial.println("0,0"); // send a starting message
delay(300); // wait 1/3 second
digitalWrite(LED_BUILTIN, LOW);
delay(50);
}
}
void loop() {
// wait for data from p5 before doing something
while (Serial.available()) {
// sends dummy data to p5
Serial.println("0,0");
// led on while receiving data
digitalWrite(LED_BUILTIN, HIGH);
// gets value from p5
int value = Serial.parseInt();
// changes brightness of the led
if (Serial.read() == '\n') {
analogWrite(ledPin, value);
}
}
// led off at end of reading
digitalWrite(LED_BUILTIN, LOW);
}
p5:
// variable to hold led brightness value
let value = 0;
function setup() {
createCanvas(640, 480);
textSize(18);
}
function draw() {
background(0);
stroke(255);
fill(255);
// checks for state of serial communication
if (!serialActive) {
text("Press Space Bar to select Serial Port", 20, 30);
} else {
text("Connected", 20, 30);
}
}
// sets up serial communication
function keyPressed() {
if (key == " ") {
// important to have in order to start the serial connection!!
setUpSerial();
}
}
// This function will be called by the web-serial library
// with each new *line* of data. The serial library reads
// the data until the newline and then gives it to us through
// this callback function
function readSerial(data) {
if (data != null) {
//////////////////////////////////
//SEND TO ARDUINO HERE (handshake)
//////////////////////////////////
// mouseX is mapped to right value before transmitted
value = int(map(mouseX, 0, width, 0, 255));
let sendToArduino = value + "\n";
writeSerial(sendToArduino);
}
}
Video
Exercise 3
Concept
An LED lights up when the ellipse touches the ground. A potentiometer is used to control the wind variable.
Code
Arduino:
// LED pin value
int ledPin = 5;
void setup() {
// Start serial communication so we can send data
// over the USB connection to our p5js sketch
Serial.begin(9600);
// We'll use the builtin LED as a status output.
// We can't use the serial monitor since the serial connection is
// used to communicate to p5js and only one application on the computer
// can use a serial port at once.
pinMode(LED_BUILTIN, OUTPUT);
pinMode(ledPin, OUTPUT);
// start the handshake
while (Serial.available() <= 0) {
digitalWrite(LED_BUILTIN, HIGH); // on/blink while waiting for serial data
Serial.println("0"); // send a starting message
delay(300); // wait 1/3 second
digitalWrite(LED_BUILTIN, LOW);
delay(50);
}
}
void loop() {
// wait for data from p5 before doing something
while (Serial.available()) {
// led on while receiving data
digitalWrite(LED_BUILTIN, HIGH);
// gets value from p5
int value = Serial.parseInt();
// turns on or off the led depending on value from p5
if (Serial.read() == '\n') {
if (value == 1) {
digitalWrite(ledPin, HIGH);
}
else {
digitalWrite(ledPin, LOW);
}
// gets sensor value
int sensor = analogRead(A0);
delay(5);
// sends sensor value to p5
Serial.println(sensor);
}
}
// indicates end of reading
digitalWrite(LED_BUILTIN, LOW);
}
p5:
let velocity;
let gravity;
let position;
let acceleration;
let wind;
let value = 0;
let drag = 1;
let mass = 50;
function setup() {
createCanvas(640, 360);
noFill();
position = createVector(width/2, 0);
velocity = createVector(0,0);
acceleration = createVector(0,0);
gravity = createVector(0, 0.5*mass);
wind = createVector(0,0);
}
function draw() {
background(255);
stroke(0);
fill(0);
if (!serialActive) {
text("Press Space Bar to select Serial Port", 20, 30);
} else {
text("Connected", 20, 30);
applyForce(wind);
applyForce(gravity);
velocity.add(acceleration);
velocity.mult(drag);
position.add(velocity);
acceleration.mult(0);
ellipse(position.x,position.y,mass,mass);
if (position.y > height-mass/2) {
velocity.y *= -0.9; // A little dampening when hitting the bottom
position.y = height-mass/2;
// sets value to 1 to indicate touching the ground
value = 1;
}
else {
// sets value to 0 to indicate touching the ground
value = 0;
}
}
}
function applyForce(force){
// Newton's 2nd law: F = M * A
// or A = F / M
let f = p5.Vector.div(force, mass);
acceleration.add(f);
}
function keyPressed(){
if (key==UP_ARROW){
mass=random(15,80);
position.y=-mass;
velocity.mult(0);
}
if (key == " ") {
// important to have in order to start the serial connection!!
setUpSerial();
}
}
// This function will be called by the web-serial library
// with each new *line* of data. The serial library reads
// the data until the newline and then gives it to us through
// this callback function
function readSerial(data) {
////////////////////////////////////
//READ FROM ARDUINO HERE
////////////////////////////////////
if (data != null) {
// divides potentiometer value into 2
// -- increments wind value if value is equal to or greater
// -- than 511
if (int(trim(data)) >= 511) {
wind.x = 3;
}
// -- decrements otherwise
else {
wind.x = -3;
}
//////////////////////////////////
//SEND TO ARDUINO HERE (handshake)
//////////////////////////////////
let sendToArduino = value + "\n";
writeSerial(sendToArduino);
}
}
Video